A typical automotive body shop runs 200 to 380 robots, lays down 4,000 to 6,000 spot welds per body-in-white, and was designed at a target of 71.5 jobs per hour — but actually delivers 63 to 64 JPH on a good day. That gap, somewhere between 7 and 9 JPH, is worth roughly $9,800 per lost vehicle in labor, overhead, and revenue at a North American assembly plant. Multiplied across three shifts, that's $235,000 of capacity bleeding out of one facility every day, and the blame almost always lands on the same usual suspects: the framing station that never quite hits cycle, the aperture station that runs 11 seconds long every fourth body, or the conveyor buffer between sub-assemblies that nobody sized correctly five years ago. Spreadsheets cannot find these. Lean walks miss them. Static throughput models declare them unsolvable. A live body shop digital twin — discrete-event simulation fused with machine-learned cycle distributions, robot-path physics, and conveyance logic — finds them in hours, simulates the fix overnight, and tells you exactly which weld cell, which robot, and which conveyor segment to touch before you spend a single dollar on the floor. This is what that twin actually does, and what it changes for your JPH.
Digital Twin · Body-in-White
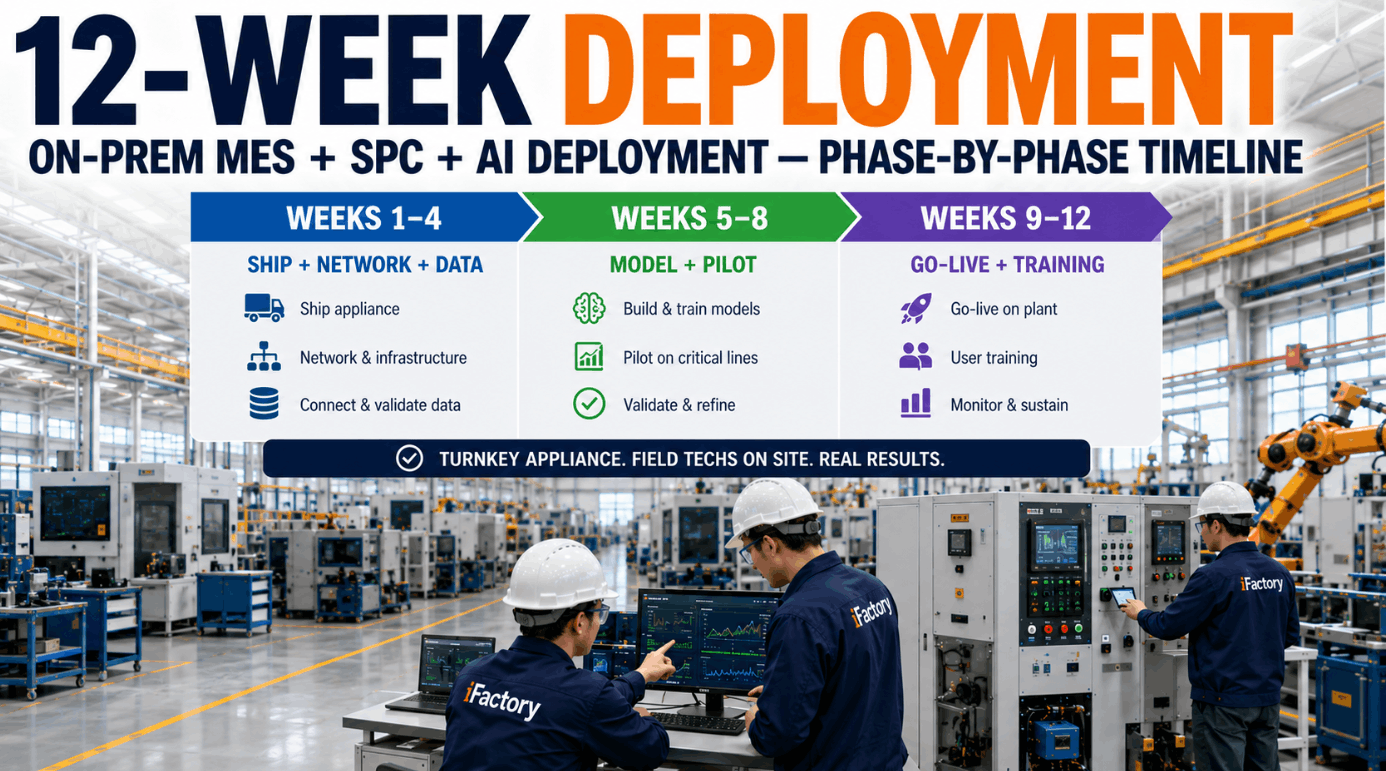
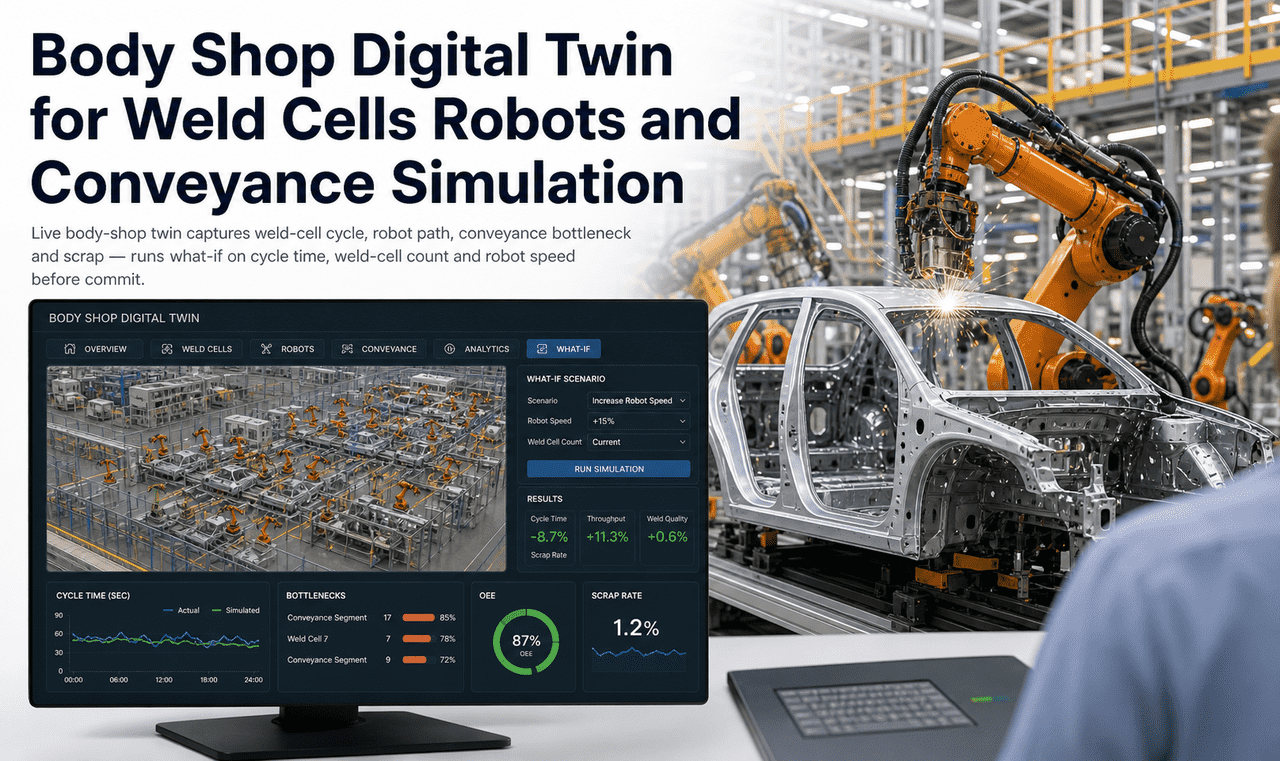
A Live Twin of Your Body Shop. Run What-If on Cycle Time, Weld Cells & Robot Speed Before You Touch the Floor.
Discrete-event simulation fused with ML-learned cycle distributions models every weld cell, robot, conveyor, and buffer in your BIW line. Test JPH targets, robot path changes, and cell-count scenarios virtually — accelerated on NVIDIA RTX Pro 6000 Blackwell. Live in 6–12 weeks.
7–9 JPH
Average gap between BIW design JPH and actual JPH
$9,800
Cost per lost vehicle at a North American BIW line
78%
Body shop efficiency in benchmarked OEM facility study
96GB
GDDR7 on RTX Pro 6000 Blackwell — runs full plant twin
What a Body Shop Digital Twin Actually Models
The phrase "digital twin" gets thrown at everything from a 3D viewer to a connected dashboard. A real body shop twin is not a picture — it is a behavioral model. It replays your line in virtual time, with the same statistical variability, the same downtime patterns, and the same conveyance constraints as the physical line. Five things have to be modeled correctly for the answers to be trustworthy.
M1
Weld Cell Cycle Distribution
Each cell's cycle time is not a single number — it is a distribution shaped by gun type, electrode wear, body variant, and operator override. The twin learns this distribution from real PLC data and replays it stochastically, so the modeled JPH reflects reality, not an idealized takt time.
Multi-robot spot-welding cells require collision-free path planning across overlapping workspaces. The twin models each robot's reachability, joint limits, and TCP timing — and uses reinforcement learning over a pointer-network architecture to minimize the longest robot's completion time per body.
M3
Conveyance & Buffer Dynamics
Skids, EMS carriers, and accumulating conveyors carry the body between stations. The twin models conveyor speed, buffer depth, blocking, and starvation — exposing where a 12-skid buffer is actually hiding a 30-second cell imbalance you'd otherwise never find.
M4
Downtime & MTBF Patterns
Every cell has a unique signature — mean time between failures, mean time to repair, micro-stop frequency. The twin imports these from CMMS history and replays them, so a "scenario at 75 JPH" reflects realistic downtime, not an unattainable theoretical maximum.
Rejected bodies route to a rework loop, displace good bodies in conveyance, and steal capacity from downstream cells. The twin models scrap rates per cell and the impact of rework re-injection on overall JPH — the loss most static models simply ignore.
The BIW Line, Modeled End-to-End
Below is the canonical body shop layout the twin reproduces — from underbody build through framing, side aperture, closures, and finesse, into paint feed. Each block is a sub-shop; each sub-shop has its own cycle distribution, robot count, and downtime profile. The twin shows you exactly where the bottleneck sits today, and what happens to JPH when you change anything upstream or downstream.
01
Underbody
62 robots · 1,400 welds · 38 sec cycle
Healthy
02
Framing
48 robots · 980 welds · 47 sec cycle
Bottleneck
03
Aperture
54 robots · 1,180 welds · 44 sec cycle
Stressed
04
Closures
38 robots · 720 welds · 35 sec cycle
Healthy
05
Finesse + Paint Feed
22 robots · 380 welds · 32 sec cycle
Healthy
The twin flagged Framing as the bottleneck and Aperture as the next failure point at 65 JPH. See a live walkthrough on your line layout.
Five What-If Scenarios — Run in the Twin, Validated Before Commit
The point of the twin is not visualization — it is decision support. Below are five canonical what-if questions every body shop manager has asked at least once, and what the twin does with them. Inputs go in. JPH delta, cost, and risk come out. No floor disruption, no commissioning weekend, no "we'll find out at startup."
WI-1
Add 2 more weld guns to the framing cell — what happens to JPH?
Input: 2 additional spot guns on RG-7 robot, +180 welds capacity per cell cycle, $340K capex
+4.2 JPH
New bottleneck shifts to Aperture station AP6 within 6 months
WI-2
Increase robot speed from 85% to 95% on the slowest cells — payoff?
Input: speed override on 12 cells, +18% cell-level throughput, $0 capex, increased TCP wear
+2.8 JPH
Electrode tip wear cycle drops from 180k to 142k — PM cost +$78K/yr
WI-3
Resize the buffer between Framing and Aperture from 8 to 14 skids?
Input: extend accumulating conveyor by 22 ft, $185K capex, 4-day install during planned shutdown
+1.6 JPH
Decouples Framing micro-stops from Aperture starvation — high confidence
WI-4
Re-sequence weld points on RG-14 to cut robot travel by 11%?
Input: RL-optimized weld sequence via reinforced pointer network, offline reprogram, 16 hours
+1.9 JPH
Cell cycle drops 4.1 sec — validated against URDF kinematics, no collision
WI-5
Run all four scenarios above together — total recovered JPH?
Input: combined model, all interactions resolved, sequencing and contention modeled
+8.4 JPH
Closes 95% of design-vs-actual gap — payback under 9 months at $9,800/vehicle
Stop Discovering Bottlenecks During Startup. See Them in Simulation Before You Cut Steel.
A live BIW twin running on RTX Pro 6000 Blackwell — discrete-event simulation, ML-learned cycle distributions, RL-driven robot path optimization. Pre-configured AI server, software pre-loaded, live in 6–12 weeks.
How a Reinforcement-Learned Robot Path Beats Hand-Tuning
Multi-robot spot-welding cells are an NP-hard problem. With four robots sharing overlapping workspaces and 80 weld points to allocate, the search space is too large for genetic algorithms to find a global optimum in any practical time. Recent research from the South China University of Technology applied a reinforced pointer network to exactly this problem — the same architecture iFactory uses inside the twin to assign welds to robots and order them to minimize the longest-running robot's completion time.
Hand-Tuned Path
Robot 4 idle time
11.1 sec
Engineer hours to tune
42 hrs
RL-Optimized Path
Engineer hours to tune
3 hrs
Why RTX Pro 6000 Blackwell Matters for the Twin
A modern body shop twin is not a single simulation. It is thousands of parallel scenarios — different JPH targets, different downtime patterns, different robot speeds, different buffer sizes — running simultaneously to give planners statistical confidence rather than a single hopeful answer. That's a workload built for the RTX Pro 6000 Blackwell Server Edition: 96GB of GDDR7 memory, RT cores for collision physics, and tight integration between simulation, rendering, and AI inference inside one architecture.
96GB
GDDR7 Memory
Holds full plant twin — every weld point, every conveyor segment, every robot URDF — in one GPU memory space without paging
9x
Throughput vs Prior Gen
Run scenarios in minutes that previously took overnight — meaning planners actually use the twin during decision meetings
RT
Real-Time Ray Tracing
Photorealistic Omniverse rendering of the body shop — same scene serves planners, operators, and ergonomics review
USD
OpenUSD Native
CAD, robot URDF, sensor feeds, and CMMS data unified in one OpenUSD scene — no proprietary lock-in, no format wars
The Numbers That Move — Validated Outcomes From Live BIW Twins
Discrete-event simulation has 30 years of academic and industrial validation behind it. A widely-cited cylinder-block study reduced cycle time by 32% and increased throughput by 65% through DES-driven line balancing. Modern AI-augmented twins compress that timeline from months to weeks because the model learns rather than being hand-built.
+8.4 JPH
Typical recovered JPH from combined what-if scenarios on a 65-JPH design body shop running below target
iFactory BIW twin scenario data
$235K/day
Cost of an 8-JPH gap on a single BIW line at $9,800/vehicle across three shifts — recovered before next quarter
North American OEM benchmark study
32%
Cycle time reduction documented on automotive cylinder-block line through DES-driven re-sequencing — peer reviewed
Academic DES line-balancing study
65%
Throughput increase on the same line — driven by tool changes and station re-sequencing identified in simulation
Same DES line-balancing study
20–40%
Downtime reduction documented across digital twin predictive maintenance applications in industrial manufacturing
Digital twin manufacturing market research 2026
9 mo
Typical payback on full BIW twin implementation when JPH gap is 6+ — most plants are well above this threshold
iFactory deployment ROI benchmarks
Frequently Asked Questions
Do we need to replace our existing PLCs, robots, or controllers?
No. The twin is read-mostly — it consumes data from your existing FANUC, ABB, KUKA, or Yaskawa controllers via standard protocols (OPC UA, Profinet, Ethernet/IP). Robot programs continue to run from the controllers themselves. The twin's role is to model behavior, run scenarios, and recommend changes that engineers then validate and deploy through normal change-control processes. There is no rip-and-replace.
How accurate is the twin compared to the physical line?
A correctly built and validated body shop twin reproduces measured JPH within 1.5–3% of actual line performance over a multi-week observation window. The accuracy comes from learning cycle distributions and downtime patterns from real PLC and CMMS data rather than using nominal takt times. Validation is part of every deployment — the twin runs alongside the real line for two to four weeks, and only then are what-if scenarios trusted for capital decisions.
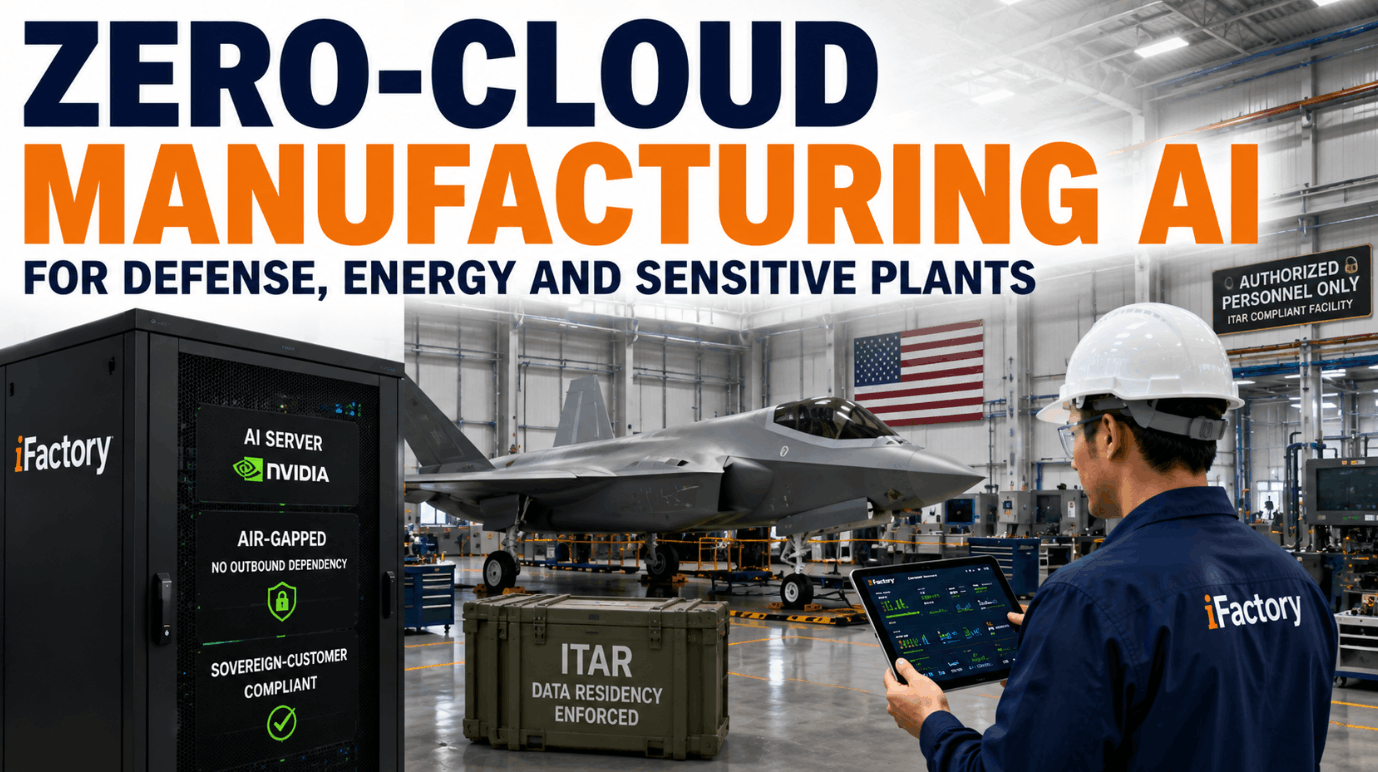
Do we buy the NVIDIA RTX Pro 6000 Blackwell server separately?
No. iFactory supplies and installs the RTX Pro 6000 Blackwell server as part of the turnkey delivery — racked, software pre-loaded with the twin runtime, Omniverse libraries, and the body shop simulation kernel. You provide line power, network, and floor space. Field technicians dispatched globally handle cabling, OT network segmentation, and PLC handshakes. Live in 6–12 weeks.
Can the twin handle multiple body styles on one line?
Yes — and this is one of the highest-value use cases. The twin models each body variant separately, including its specific weld map, fixture configuration, and cycle distribution. Mix-model scenarios show exactly how throughput changes when sedan-to-SUV ratio shifts, when a new variant is added, or when a regional model swap happens. This is what made digital twins the standard tool for flexible body shop concepts in the VW Group, BMW, and Audi networks.
How does the twin integrate with our existing simulation tools?
The twin is OpenUSD-native, which means CAD models from CATIA or NX, robot programs from RobotStudio, ROBOGUIDE, or Process Simulate, and conveyor layouts from FlexSim or Plant Simulation can be imported without conversion. The twin does not replace your offline programming tools — it consumes them and adds the system-level behavioral layer that those tools lack. Engineers continue to work in their preferred environment.
How long until we see measurable JPH improvement?
Phase 1 — twin commissioning and baseline validation — runs 4 to 8 weeks. The first what-if scenarios are typically simulated in week 6, and the highest-confidence recommendations (zero-capex robot speed and path changes) can deploy to the floor within 12 weeks of project start. Capex-heavy scenarios (buffer resizing, additional cells) usually align to the next planned shutdown. Most plants see measurable JPH lift on the bottleneck cell within one quarter of go-live.
From "We Think It's the Framing Station" to "Here's the JPH Number, the Cost, and the Date." That's the Difference.
A turnkey BIW digital twin on NVIDIA RTX Pro 6000 Blackwell — discrete-event simulation, RL-driven robot paths, ML-learned cycle distributions, OpenUSD-native. 1000+ industrial clients, 99.9% uptime, 24×7 fully managed. Get a contractually committed delivery date.
-syncs-back-to-mes-and-spc-in-real-time.png)