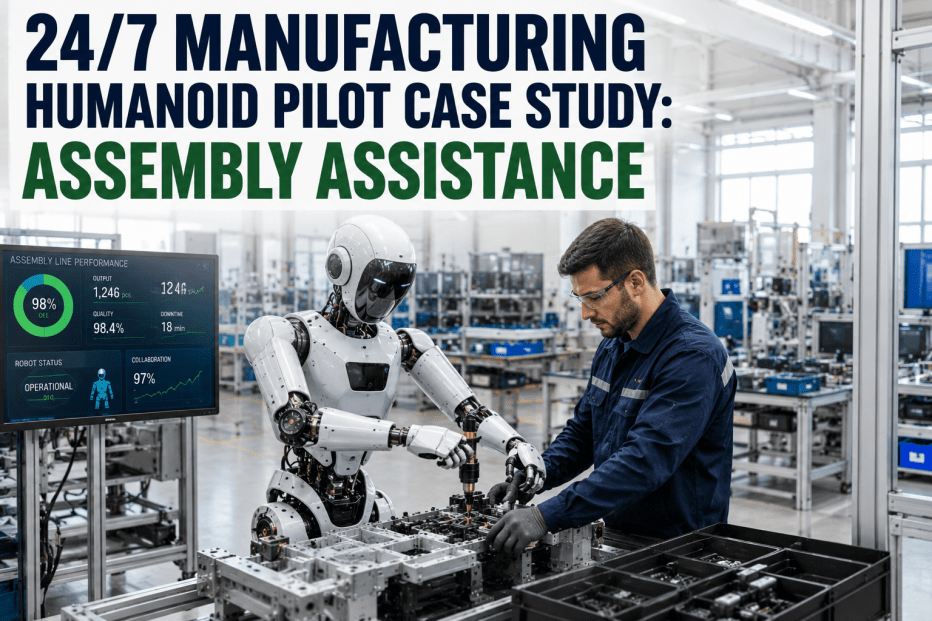
The steel plant production director reviewed the quarterly assembly line performance report: 72 percent overall equipment effectiveness, 14 unplanned downtime events attributed to skilled labor availability, and an average of 38 days to backfill a retiring boilermaker or fitter. The structural steel fabrication line was running below capacity not because of equipment constraints but because the skilled assembly workforce was stretched across too many stations, spending 30 to 50 percent of their time on material transport, component positioning, and repetitive fastening tasks that did not require their trade expertise. Humanoid robots — bipedal, dexterous machines powered by embodied AI — have reached sufficient commercial maturity for controlled pilot deployment in steel plant assembly environments, offering the capability to handle the physical and repetitive elements of assembly work while the skilled worker focuses on fit-up decisions, weld quality, and process adjustments. iFactory AI's Robotics AI module provides the deployment platform that connects humanoid robot assembly assistance to MES work orders, production schedules, and quality records — enabling steel plants to pilot humanoid collaboration within a structured 12-week roadmap without disrupting existing production operations. Book a Demo to see the platform configured for your steel plant assembly pilot.
Humanoid Pilot Roadmap: Steel Plants Assembly Assistance — A 12-Week Deployment Framework
iFactory AI delivers a structured 12-week pilot roadmap for deploying humanoid robots in steel plant assembly operations, with task assessment templates, workforce integration protocols, KPI tracking, and MES/CMMS integration through the Robotics AI module.
Why Humanoid Assembly Assistance Is the Next Frontier in Steel Plant Automation
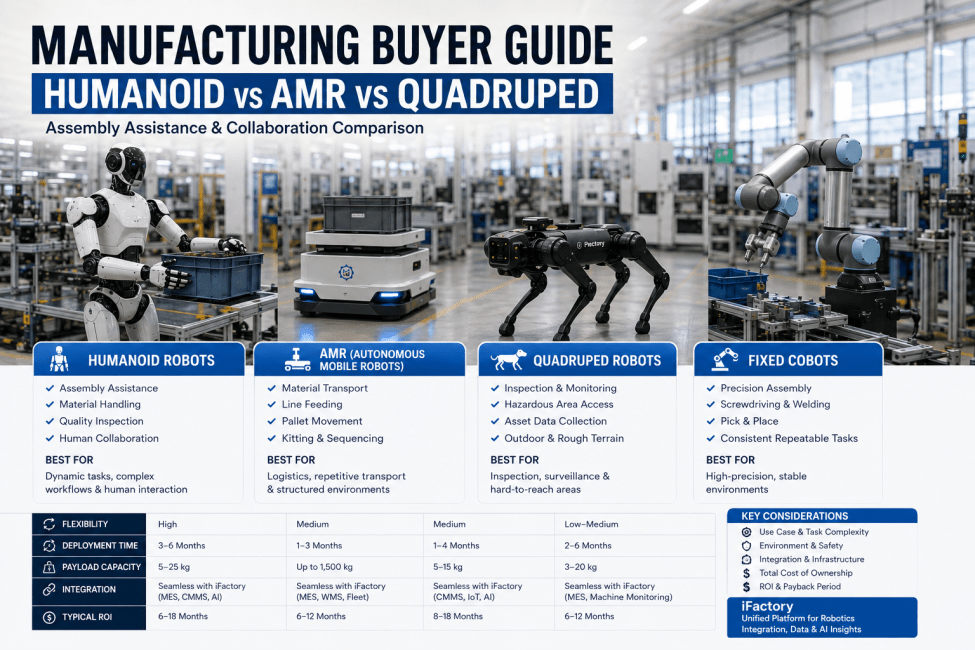
Steel product assembly operations — structural beam fabrication, rebar cage assembly, pipe spool fitting, plate girder welding, and component kitting — involve a combination of heavy material handling, precise positioning, and repetitive joining tasks that are physically demanding for human workers and difficult to automate with fixed industrial robots due to the variety of product configurations and the unstructured nature of steel fabrication environments. Humanoid robots address this gap by combining the dexterity and spatial awareness of a skilled worker with the consistency, endurance, and data-recording capability of an automated system. They do not replace the boilermaker, welder, or fitter — they handle the material transport, component positioning, and repetitive fastening that currently consume half of those skilled workers' time.
Material Transport and Positioning
Humanoid robots transport steel components from staging areas to assembly stations, position beams and plates within tolerance for welding or bolting, and hold components in position while the human worker performs the joining operation — eliminating the need for overhead crane operation or fixture adjustments for every product configuration.
Repetitive Fastening and Torquing
Bolt tightening, clip installation, and repetitive tack welding on multi-joint assemblies are performed by the humanoid robot following a programmed sequence, freeing the skilled worker to focus on critical weld passes and fit-up verification. Each fastening operation is recorded with torque value, location, and timestamp for quality traceability.
Component Kitting and Pre-Assembly
Humanoid robots stage and pre-assemble sub-components — brackets, clips, stiffeners, and fittings — at satellite workstations before delivery to the main assembly line, reducing line-side inventory and enabling parallel pre-assembly that accelerates the critical path of the final assembly process.
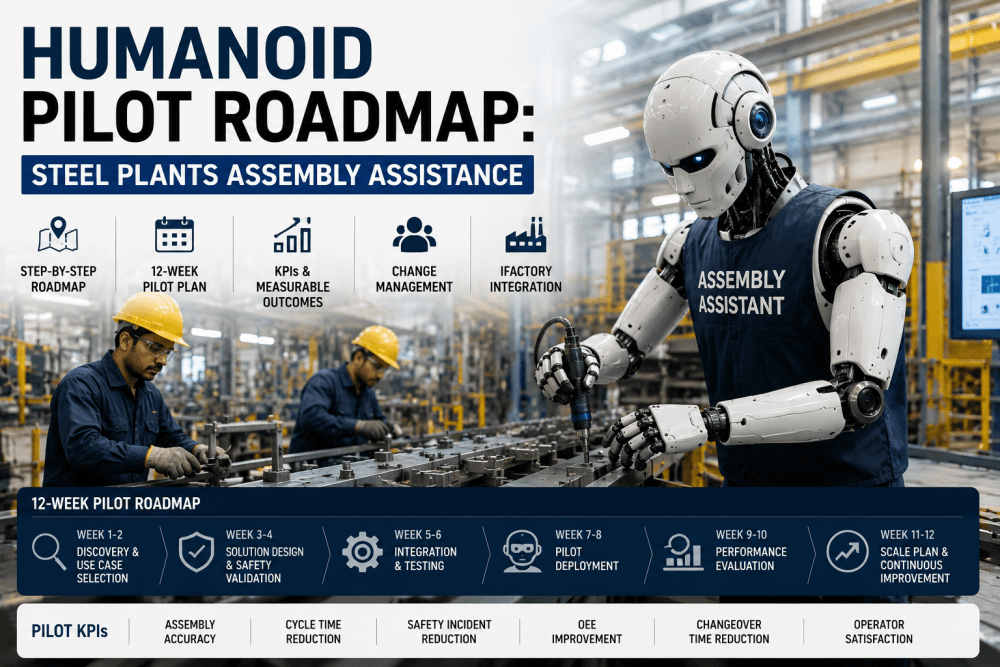
12-Week Humanoid Assembly Pilot — Phase-by-Phase Deployment Framework
The 12-week pilot roadmap moves from opportunity identification through autonomous assembly assistance in four structured phases. Each phase includes specific deliverables, decision gates, and workforce engagement activities that ensure the pilot generates measurable productivity data while maintaining production continuity and building the organizational capability to scale.
Phase 1 — Weeks 1-2: Assembly Task Analysis and Robot Selection
The operations and industrial engineering teams identify the target assembly tasks for the pilot — selecting operations that are physically demanding, repetitive, or that consume significant skilled labor hours without requiring the worker's full trade expertise. Each candidate task is evaluated for technical feasibility, safety integration requirements, and estimated productivity impact using iFactory's task assessment framework. The humanoid robot platform is selected based on reach, payload capacity, and end-effector compatibility with the target tasks. A pilot charter is developed defining the scope, success criteria, and decision gate for proceeding to Phase 2.
- Task selection matrix evaluating each candidate assembly operation across seven feasibility dimensions
- Pilot charter with defined Go/No-Go criteria for each phase transition
- Workforce communication plan drafted for town-hall introduction before equipment arrival
- Baseline productivity measurement conducted on target assembly station pre-deployment
Phase 2 — Weeks 3-6: Station Integration and Safety Validation
The humanoid robot is integrated into the target assembly station with safety-rated speed and separation monitoring, force-limited end-effectors, and zone-based access control that ensures the robot operates safely alongside human workers without physical barriers. The robot's task programming is developed using demonstration-based learning — a skilled worker performs the task once while the robot records the motion sequence, which is then edited and validated by the engineering team. iFactory's Robotics AI module is configured to capture cycle time data, task completion rates, and quality metrics from the robot's onboard sensors, with the data flowing directly to the MES production record for the pilot station.
- Safety integration validated per ISO 10218 and ISO/TS 15066 collaborative robot standards
- Demonstration-based programming capturing worker's motion sequence in single walk-through
- iFactory Robotics AI module configured with MES and CMMS data connectors
- Operator training program delivered for assigned production workers and maintenance technicians
Phase 3 — Weeks 7-10: Supervised Collaboration and Data Collection
The humanoid robot operates in supervised collaboration mode with the assigned production worker, who has completed a two-day training program covering humanoid interaction protocols, task supervision, and emergency response procedures. The worker and robot perform the target assembly task together for four weeks, with the robot handling material positioning and repetitive fastening while the worker focuses on fit-up decisions and critical joining operations. Cycle time, error rate, and worker feedback are collected daily and reviewed in weekly pilot review meetings. The iFactory platform generates a daily productivity report comparing the humanoid-assisted station against the baseline manual station.
- Daily productivity comparison report generated automatically from MES data
- Worker feedback survey administered weekly with structured results tracking
- Weekly pilot review meeting with operations, engineering, and workforce representatives
- Task sequence adjustments implemented based on worker observation and feedback
Phase 4 — Weeks 11-12: Autonomous Operation and Scale Decision
The humanoid robot transitions to autonomous assembly assistance, executing the programmed task sequence without direct worker supervision while the human worker remains available for quality verification and exception handling. The pilot data package is compiled including productivity improvement, quality impact, worker adoption metrics, and total cost of operation. A scale decision is made based on the pilot charter criteria — if the productivity improvement meets or exceeds the 15 percent target and worker feedback is positive, the project moves to the scale planning phase for deployment across additional assembly stations with a Phase 2 deployment plan.
- Autonomous operation protocol established with clear human-override authority
- Pilot data package compiled with productivity, quality, workforce, and economic metrics
- Scale decision gate executed against pilot charter criteria
- Phase 2 deployment plan developed for additional assembly stations
Workforce Collaboration Model — Four Practices That Determine Pilot Success
The success of a humanoid assembly pilot depends less on the robot's technical capability and more on the workforce's willingness to integrate the robot into their daily work. Steel plant assembly workers whose jobs involve physical skill and tradecraft are understandably skeptical of automation that they perceive as a threat to their role. The facilities that achieve the highest humanoid adoption rates share four workforce integration practices built into the pilot roadmap from week one.
- The pilot is introduced to the production workforce in a town-hall format before any equipment arrives on the plant floor
- Specific tasks the robot will assist with are clearly communicated — material transport, component positioning, repetitive fastening
- The human worker remains the decision-maker for weld quality, fit-up acceptance, and process adjustments
- Workers are invited to provide input on task selection and workstation layout before the pilot begins
- Robot task sequences programmed using demonstration-based learning where a skilled worker performs the task once while the robot records the motion
- The robot executes the task the way the experienced worker does — including subtle adjustments and sequence preferences
- Eliminates need for specialized robotics programming skills within the plant workforce
- Workers see their knowledge transferred directly into the robot's capability
- Productivity metrics from the pilot are shared openly with the workforce, including both the robot's task completion data and the human worker's value-added time
- When workers see that the robot is handling 30 percent of the physical task burden without reducing their decision-making role, adoption accelerates
- Worker feedback collected through structured surveys at the end of each pilot week
- Results reviewed in weekly pilot meetings with production team representation
- Workers who participate in the pilot are offered training in robot programming, task definition, and humanoid supervision
- Skills represent career advancement in increasingly automated manufacturing environment
- First workers to achieve humanoid collaboration certification become trainers for subsequent deployment phases
- Peer-led adoption model builds internal capability rather than relying on external vendor support
Measurable Outcomes — Humanoid Assembly Pilot KPI Benchmark Framework
Measuring the right metrics during the humanoid pilot determines whether the organization generates the data needed to make an informed scale decision. The KPI framework below captures productivity, quality, workforce adoption, and economic dimensions — a pilot that performs well on all four dimensions is ready for scaled deployment. A pilot that performs well on productivity and quality but shows poor workforce adoption signals a change management gap that must be addressed before expanding scope.
| KPI Category | Specific Metric | Measurement Method | Pilot Target |
|---|---|---|---|
| Productivity | Assembly cycle time per unit | iFactory Robotics AI cycle time tracking | No increase vs. baseline manual cycle |
| Productivity | Skilled labor value-added time ratio | Time observation study pre- and post-pilot | 15%+ improvement |
| Quality | First-pass yield at pilot station | MES quality record comparison | Equal or better than baseline manual yield |
| Workforce | Worker adoption score | Weekly survey (1–10 scale, 4 questions) | Average score 7+ by week 8 |
| Workforce | Volunteer rate for next phase | Phase 2 sign-up tracking | 50%+ of pilot workers volunteer |
| Economic | Total cost per assembly hour | iFactory cost tracking module | 10%+ reduction vs. baseline |
Industry Perspective on Humanoid Assembly Pilot Deployment in Steel Plants
The plant operations leaders who have moved from evaluating humanoid technology to running structured pilots share a consistent experience: the first pilot reveals assembly task characteristics and workforce dynamics that no amount of planning could have predicted, which is precisely why the 12-week pilot structure with defined decision gates is critical — it forces the organization to generate real data before committing to scale.
I have led automation pilots across fifteen steel fabrication facilities over my career, and the single most important lesson I have learned is that the pilot structure matters more than the technology. I have seen facilities deploy technically impressive robots that failed because the workforce was not engaged until week six, or because the productivity metrics were not defined before the robot arrived, or because there was no clear decision gate for scaling at week twelve. The facilities that succeed treat the humanoid pilot as an operational experiment with defined hypotheses, measurement systems, and decision criteria — not as a technology demonstration. When the pilot is structured this way, the workforce sees the robot as a tool that makes their job better rather than a threat to their job security, and the organization builds the capability to deploy the next station in half the time.
The Time for a Structured Humanoid Assembly Pilot Is Now — Here Is the Roadmap to Start
The 12-week humanoid pilot roadmap provides a structured framework for steel plant operations leaders to evaluate humanoid assembly assistance in their specific production environment — generating the productivity data, workforce feedback, and economic validation needed to make an informed scale decision. The facilities that achieve the highest return from humanoid deployment share three characteristics: they engage the workforce before the technology arrives, they define success metrics before the robot performs its first task, and they use a platform like iFactory Robotics AI that captures the data needed to prove the business case and enables rapid deployment across subsequent stations without rebuilding the integration layer each time.
iFactory AI's Robotics AI module provides the complete deployment platform for humanoid assembly pilots — from task assessment and demonstration-based programming through productivity tracking and MES integration. The platform captures every data point needed for the pilot KPI framework automatically, eliminating manual data collection and enabling real-time visibility into pilot performance for both operations leadership and the production workforce. Book a Demo to discuss your steel plant's humanoid pilot requirements and see the platform configured for your assembly operations.
Deploy a Structured Humanoid Assembly Pilot with iFactory AI's Robotics Module
iFactory AI's Robotics AI module provides task assessment templates, demonstration-based programming, safety integration protocols, workforce collaboration tools, and automated KPI tracking — everything your steel plant needs to run a successful 12-week humanoid assembly pilot and build the business case for scaled deployment.
Humanoid Assembly Pilot — Frequently Asked Questions
What assembly tasks in steel manufacturing are best suited for a humanoid robot pilot?
Material transport and positioning, repetitive fastening and torquing, component kitting and pre-assembly, and dimensional inspection and quality data recording are the four task categories that deliver the highest value in steel plant assembly pilots. The best candidate tasks are those that are physically demanding, consume significant skilled labor hours, follow a predictable sequence, and require manipulation capability that fixed industrial robots cannot provide due to the variety of product configurations. Tasks that require complex process decisions — weld parameter adjustment, fit-up acceptance, or non-destructive evaluation — should remain with the skilled human worker during the pilot phase. iFactory's task assessment framework evaluates each candidate task across seven dimensions and produces a suitability score that guides task selection.
How does safety integration work for humanoid robots working alongside assembly workers in steel fabrication environments?
Humanoid robots operate with safety-rated speed and separation monitoring, force-limited end-effectors, and zone-based access control that ensures the robot stops or slows automatically whenever a worker enters the defined collaboration zone. The robot's sensors continuously track personnel positions relative to the robot's operating envelope, and any unexpected contact triggers an immediate stop within milliseconds. Safety integration follows the same standards as collaborative industrial robots — ISO 10218 and ISO/TS 15066 — and is validated by a qualified safety engineer during the station integration phase before any production work begins. The collaboration model is designed so that the robot handles material transport and repetitive fastening while the human worker focuses on quality decisions, with physical separation maintained during high-force operations.
What happens if the humanoid robot makes an error during assembly — does it damage the product or slow down production?
The humanoid robot operates with force-limited end-effectors and real-time torque monitoring that detect any deviation from the programmed task parameters. If the robot encounters unexpected resistance, a positioning error, or a component that does not match the expected geometry, it stops the current operation, returns to a safe position, and alerts the human worker with a description of the error condition and a suggestion for corrective action. The worker reviews the situation, makes any needed adjustments, and resumes the operation. This error-handling protocol ensures that the robot does not continue operating in an error state — which protects both the product and the equipment — while keeping the human worker in the decision-making loop for any situation the robot's sensors cannot resolve autonomously.
How do the economics of a humanoid assembly pilot work — what is the typical investment and payback period?
A humanoid assembly pilot for a single station typically requires a capital investment of $85,000 to $150,000 including the robot platform, end-effectors, safety integration, and software setup, plus a monthly software subscription for the iFactory Robotics AI platform. The payback period for successful pilots ranges from three to six months based on productivity improvement and skilled labor reallocation. The payback calculation assumes a 15 to 25 percent improvement in value-added time for the skilled worker at the pilot station, combined with quality improvement from consistent task execution and reduced rework. iFactory's pilot economics calculator provides a facility-specific payback projection based on the target assembly tasks, current cycle times, and labor rates.
What internal team capabilities are needed to support a humanoid robot pilot?
The internal pilot team should include an operations sponsor with decision authority for the pilot station, an industrial engineer who leads task selection and productivity measurement, a maintenance technician trained in humanoid robot basics and emergency procedures, and one or more production workers who volunteer to collaborate with the robot during the pilot. The iFactory Robotics AI module reduces the programming and integration expertise required by providing demonstration-based programming, pre-built MES and CMMS connectors, and automated productivity reporting — enabling the internal team to focus on operations and workforce integration rather than robotics engineering. Most facilities assign three to four people to the pilot team, dedicating approximately 15 percent of their time during the 12-week pilot period.
.png)