The lead maintenance engineer at a 1.2 GW coal-fired plant in the Ohio Valley watched the confined space entry permit being signed off for the sixth time that month. A technician in full PPE would descend into the bottom ash hopper — 140 degrees Fahrenheit, airborne particulates, zero visibility beyond the headlamp beam to visually inspect wear patterns on the refractory lining. The inspection took 45 minutes. The pre-entry atmospheric testing took 30. The permit paperwork took another 20. Total productive time: less than one hour of actual inspection from a three-hour procedure that exposed a skilled tradesperson to a permit-required confined space with engulfment, thermal, and respiratory hazards.
Quadruped Robot Inspection for Power Plants – AI-Powered Plant Patrol
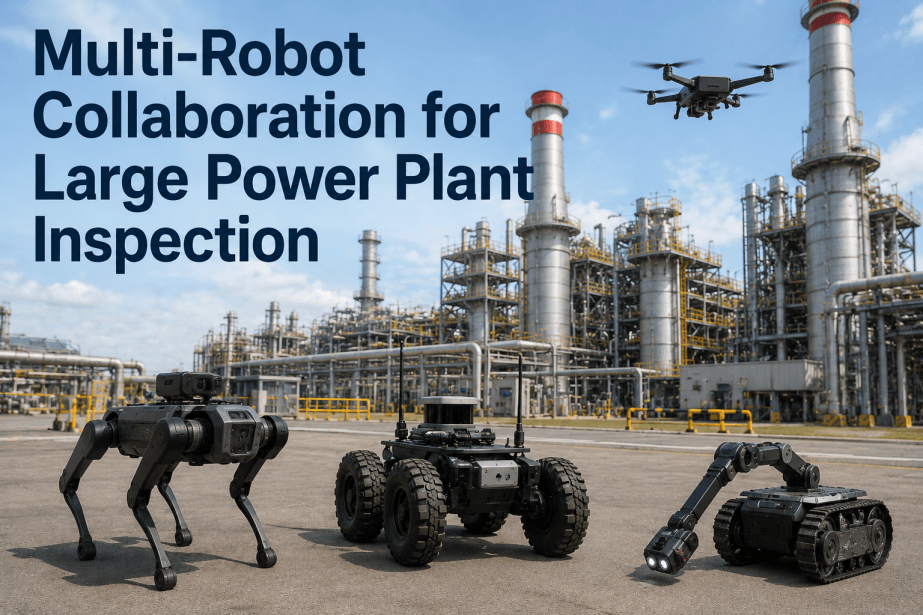
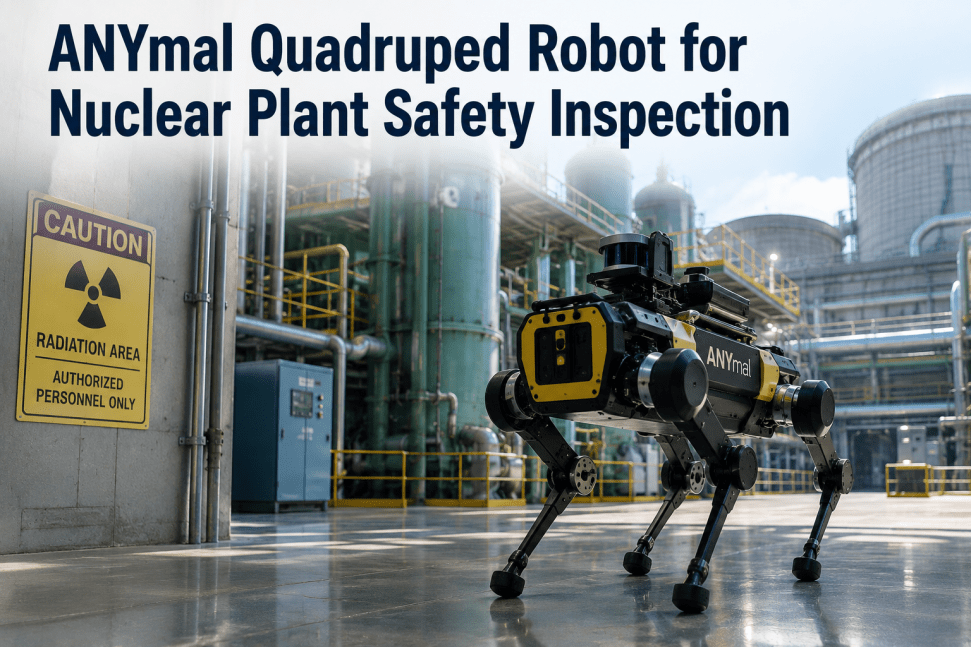
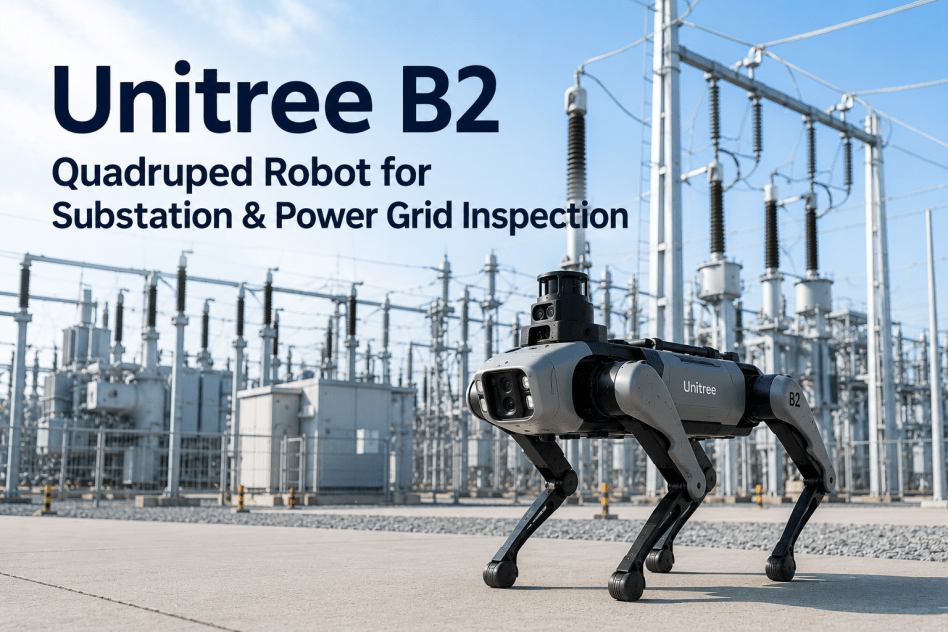
iFactory integrates quadruped robots — including Unitree B2, ANYmal, and Spot — into a unified inspection platform that navigates stairs, confined spaces, and hazardous zones autonomously. LiDAR mapping, thermal imaging, and acoustic data stream directly into your asset management system without putting personnel at risk.
One Integrated Platform for Quadruped Robot Deployment and Inspection Data Management
iFactory is the first industrial AI platform with native quadruped robot integration designed specifically for power plant inspection operations. The platform connects directly to your robot fleet — Unitree B2, ANYmal CVI, Boston Dynamics Spot — and ingests LiDAR point clouds, thermal radiometric data, gas detection readings, and acoustic emissions into a unified inspection management system. Autonomous patrol routes are configured through iFactory's mission planner, with inspection data automatically tagged to asset tags, work orders, and equipment history records in your CMMS.
Six Core Quadruped Robot Inspection Capabilities for Power Plants
iFactory delivers a complete suite of robotic inspection capabilities that address the highest-impact inspection areas across coal, gas, nuclear, and renewable power generation facilities. Each capability is production-ready and proven in commercial power plant environments.
Infrared Thermography of Active Assets
Quadruped robots equipped with radiometric thermal cameras perform scheduled patrols of steam lines, boiler casings, transformer banks, switchgear, and rotating equipment. Surface temperature anomalies are detected, geolocated, and compared against historical baselines automatically, with alerts generated when readings exceed predefined thresholds.
3D Laser Scanning for Asset Condition and Change Detection
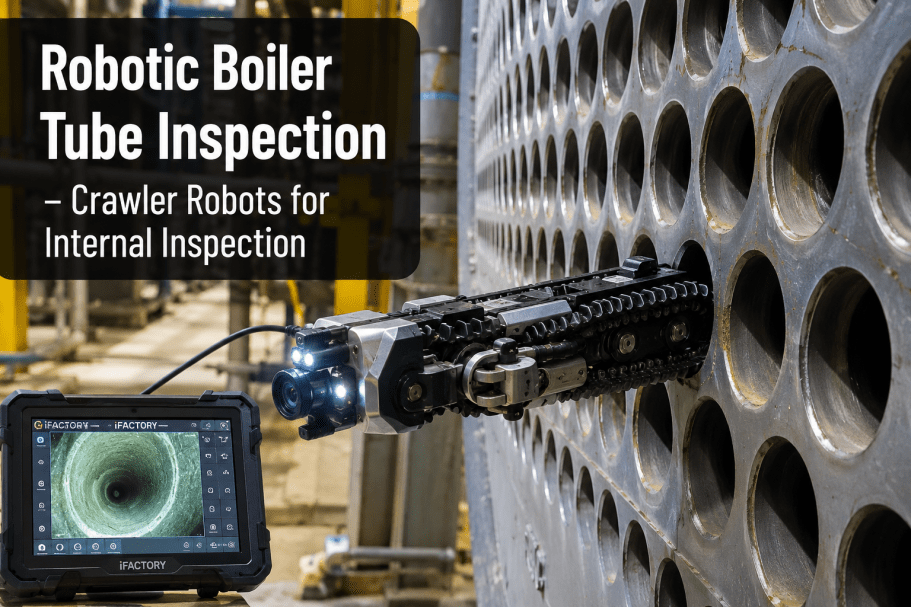
Onboard LiDAR sensors generate high-density point clouds of boiler interiors, coal bunkers, pipe galleries, and turbine halls. iFactory processes these point clouds against previous scans to detect structural deformation, refractory wear, ash buildup, and geometric changes that indicate emerging failure modes.
Autonomous Entry for Permit-Required Confined Spaces
Quadruped robots equipped with gas detection, thermal imaging, and visual cameras enter bottom ash hoppers, scrubber tanks, condensers, and coal silos without requiring personnel to don PPE, complete entry permits, or assume confined space risk.
Ultrasonic and Airborne Acoustic Inspection
Quadruped robots carry ultrasonic contact transducers and airborne acoustic sensors to detect steam leaks, compressed air leaks, bearing degradation, and corona discharge in high-voltage equipment.
Continuous Atmospheric Monitoring in Hazardous Zones
Quadruped robots equipped with multi-gas detectors patrol coal handling areas, hydrogen-cooled generator zones, natural gas supply lines, and chemical storage areas. Real-time gas concentration data is streamed to iFactory's safety dashboard with GPS-tagged location data, enabling immediate evacuation alerts if LEL, H2S, CO, or O2 deficiency thresholds are exceeded — all without exposing an operator to the hazard.
Multi-Level Autonomous Patrol Across Plant Infrastructure
Quadruped robots climb stairs, traverse grated walkways, negotiate cable trays, and operate on uneven terrain without modification. iFactory's mission planner supports multi-floor patrol routes that include stair ascents, elevation changes, and door operations via robotic arm attachments. A single robot can inspect all six levels of a boiler house, the turbine deck, and the outdoor switchyard in one continuous autonomous mission.
From Robot Deployment to Autonomous Patrol in Four Steps
iFactory connects your quadruped robot fleet to your plant asset management infrastructure and transforms inspection operations without disrupting ongoing maintenance activities.
Deploy Robot and Configure Mission Planner
iFactory integrates with your robot platform through vendor-provided SDKs and APIs — Unitree B2, ANYmal, or Spot. The mission planner is configured with plant-specific patrol routes, stairway navigation waypoints, door operation sequences, and inspection hold points at each asset location. A single 8-hour site survey maps the full patrol environment.
Connect Sensors and Calibrate Inspection Profiles
Thermal cameras, LiDAR, gas detectors, and acoustic sensors are calibrated against plant-specific baseline conditions. iFactory creates asset-specific inspection profiles that define reading locations, acceptable ranges, and data capture parameters for each piece of equipment on the patrol route. Calibration is validated against known reference points.
Deploy Inspection Dashboards and Alert Logic
Maintenance managers, reliability engineers, and plant operations teams receive role-specific dashboards with real-time patrol status, anomaly detection alerts, asset health trends, and historical comparison views. Alert thresholds are configured based on OEM specifications, historical failure data, and industry standards for each asset class.
Run Autonomous Patrols and Act on Inspection Intelligence
Quadruped robots execute scheduled autonomous patrols — daily, weekly, or on-demand — navigating plant infrastructure without human intervention. Inspection data is processed in real time, with anomalies flagged and routed to the appropriate maintenance workflow in your CMMS. Trend analysis identifies emerging degradation patterns weeks or months before they would be detected by manual inspection.
Why Traditional Power Plant Inspection Methods Fall Short
Most power plants conduct inspections using a combination of manual visual checks, periodic thermography campaigns, and intrusive confined space entries that expose personnel to serious hazards. The cost and risk of these methods are compounded by aging workforces, shrinking maintenance budgets, and increasing regulatory pressure to document equipment condition at every operating cycle.
Confined Space Entry Hazards
Boiler interiors, bottom ash hoppers, scrubber vessels, and condensers are permit-required confined spaces that expose personnel to engulfment, atmospheric, thermal, and mechanical hazards. Each entry requires atmospheric testing, ventilation setup, standby personnel, and full PPE protocols — consuming 2-3 hours of labor for every hour of actual inspection. A single serious incident in a confined space can shut down a unit for weeks and trigger OSHA penalties exceeding $250,000.
Inconsistent Inspection Data Quality
Manual inspections produce subjective observations that vary between inspectors, shifts, and outage cycles. A thermography reading taken at 10:00 AM during full load may show different surface temperatures than the same location inspected at 2:00 PM during a load reduction, yet the manual log captures neither the operating context nor the spatial reference needed for meaningful trend analysis. Without consistent data collection protocols, asset degradation trends remain invisible until failure occurs.
Inaccessible Asset Locations
Many critical power plant assets are located at heights, in confined spaces, or in environments that exceed safe human exposure limits. Boiler tubes 150 feet above the turbine deck, steam lines in pipe galleries with ambient temperatures exceeding 120 degrees Fahrenheit, and coal bunkers with oxygen-deficient atmospheres are inspected infrequently or not at all. The resulting data gaps create blind spots in the asset condition monitoring program that contribute directly to unplanned outages.
What Power Plants Achieve with Quadruped Robot Inspection
Early adopters across coal, gas, and combined-cycle power generation facilities report measurable improvements in inspection efficiency, personnel safety, and asset reliability within 90 days of deploying iFactory with quadruped robot integration. These results are from operating power plant environments running autonomous patrols in production.
Manual Power Plant Inspection vs. Quadruped Robot Autonomous Patrol
| Inspection Area | Manual Inspection | iFactory + Quadruped Robot |
|---|---|---|
| Boiler Tube Inspection | Scaffold erection, confined space entry, visual inspection with borescope, subjective assessment logged on paper | Robot climbs boiler levels autonomously, captures thermal panorama and LiDAR scan, auto-compares against prior patrol data, generates quantified wear report in CMMS |
| Transformer Yard Patrol | Monthly walkdown by electrician, infrared spot checks, oil level visual verification, manual data logging | Weekly autonomous patrol with thermal, visual, and acoustic sensors; continuous oil temperature trend analysis; automated alert on emerging bushing hot spots or oil leak sounds |
| Coal Conveyor and Bunker Inspection | Visual walkdown with flashlight, manual belt tracking check, spot temperature readings at head pulley (often skipped due to dust and access difficulty) | Autonomous patrol with thermal camera monitoring belt temperature, LiDAR scanning bunker level and bridge buildup, gas detector monitoring CO accumulation risk |
| Cooling Tower and Circulating Water | Visual inspection of fill media from access platform, manual water sampling, quarterly thermography if scheduled | Robot navigates tower basin and fill area with thermal imaging to detect fill degradation; continuous water temperature profiling at multiple elevations; automated fill condition index |
| Steam Line and Pipe Gallery | Bi-annual walkdown with IR gun, visual inspection for lagging damage, steam leak detection by sound (ambient noise limits accuracy) | Monthly autonomous patrol with ultrasonic acoustic sensors detecting steam leaks below ambient threshold; thermal panorama of entire gallery; automated corrosion-under-insulation risk scoring |
Industry Expert Perspective on Quadruped Robots for Power Plant Inspection
"I spent three decades trying to get more inspection data out of plants without putting more people at risk. The fundamental tension in power plant maintenance has always been between coverage and safety — we knew which assets needed more frequent inspection, but we could not justify the confined space entries, the scaffold builds, the hot work permits, and the personnel exposure required to get that data. Quadruped robots resolve that tension entirely. A robot that can climb six flights of stairs, walk into a 140-degree ash hopper with a thermal camera and LiDAR, and upload a complete inspection report to the CMMS without a single permit being written is not a future technology"
Transform Your Power Plant Inspection Program with Quadruped Robot Autonomous Patrols
Power generation facilities face increasing pressure to reduce maintenance costs, improve workforce safety, and extend asset life — all while dealing with an aging workforce and increasing regulatory scrutiny of inspection documentation. Manual inspection programs that rely on confined space entries, subjective visual observations, and inconsistent data collection cannot deliver the reliability and safety performance that modern power plant operations demand.
iFactory provides the unified platform that connects quadruped robot autonomous patrols to your asset management infrastructure — delivering consistent, sensor-rich inspection data with zero personnel exposure to confined spaces, hazardous atmospheres, and elevated work areas.
You can have autonomous quadruped robot patrols running across your boiler house, turbine deck, and switchyard within four weeks. Book a Demo and see iFactory's robotics integration platform applied to a live power plant inspection simulation.
Frequently Asked Questions About Quadruped Robot Inspection for Power Plants
Plant managers, maintenance engineers, and reliability professionals ask these questions before deploying autonomous robotic inspection in power generation environments.
Stop Sending People Into Hazardous Spaces. Start Deploying Robots.
iFactory delivers production-ready quadruped robot inspection for power plants in 2-4 weeks, running on an on-premise appliance with zero cloud dependency. You provide the plant access; we provide autonomous patrols that eliminate confined space entries, reduce inspection cycle times by 3x, and deliver consistent, sensor-rich asset condition data directly to your CMMS. Book a demo to see iFactory's robotics integration platform applied to a live power plant inspection simulation.