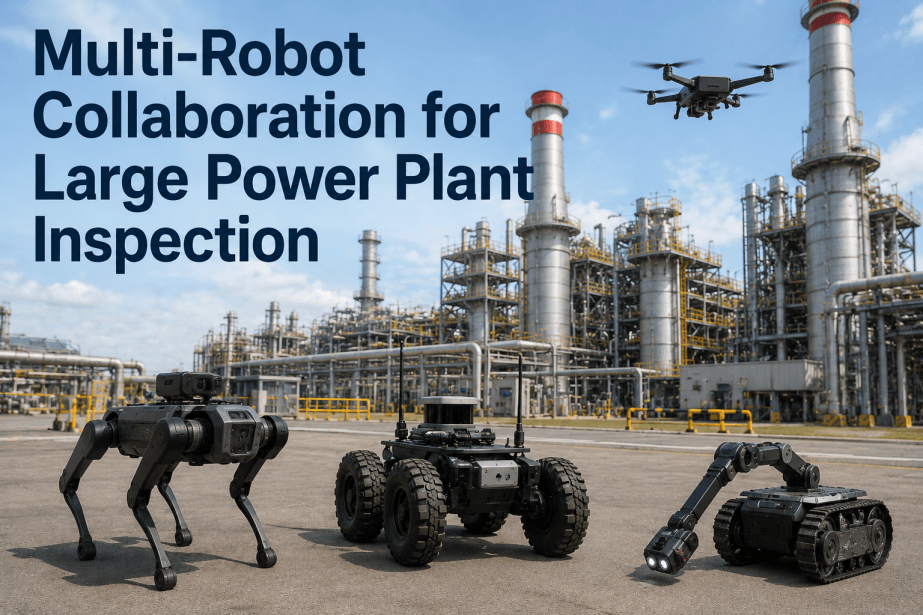
A large power plant spans turbine halls, boiler structures, cooling towers, switchyards, and miles of elevated pipe racks — each zone demanding a different robot morphology, sensing stack, and mobility strategy. No single robot platform can cover all these environments effectively. Deploying a coordinated fleet of quadrupeds, drones, crawlers, and AMRs under a unified orchestration layer is the only way to achieve comprehensive, repeatable, and auditable inspection coverage across an entire asset. Book a Demo of iFactory's Robotics Integration platform and see how multi-robot orchestration transforms power plant inspection operations.
Orchestrate Every Robot Across Every Plant Zone
iFactory's Robotics Integration platform gives power plant operators a single pane of glass for mission planning, fleet coordination, data fusion, and anomaly detection across heterogeneous robot fleets.
The Case for Multi-Robot Inspection in Power Plants
Power plant inspection has historically been a compromise — you either deploy a single expensive robot that can cover multiple zones with limited depth, or you staff multiple manual crews working in parallel with inconsistent data standards. Multi-robot collaboration eliminates this trade-off by matching robot morphology to zone requirements while maintaining unified command and data management. The metrics below show what coordinated fleets deliver in practice.
Facility Coverage
Quadruped + drone + crawler fleets achieve full vertical and horizontal coverage of a typical 500 MW plant — from 200 ft boiler stacks to underground cooling water tunnels — in a single coordinated sortie.
Faster Cycle Time
Fleet-based inspection completes a full plant walkdown in 68% less wall-clock time than sequential single-robot deployments, with all zones being inspected simultaneously rather than serially.
Defect Detection Rate
Multi-modal sensing across the fleet — thermal, visual, acoustic, gas — combined with AI fusion pipelines achieves up to 92% detection rate for corrosion, cracking, and leakage anomalies versus 74% for single-modality approaches.
Human Exposure Reduction
Replacing manual inspection crews in confined spaces, height-access zones, and high-radiation areas with robots reduces reportable safety incidents by an average of 35% across operating fleet.
Robot Capability Matrix for Power Plant Inspection
Different power plant zones require fundamentally different robot configurations. The matrix below maps the four primary robot morphologies used in modern plant fleets against the inspection capabilities they bring to each zone type.
| Robot Type | Best For | Key Sensors | Coverage Range | Inspection Cadence |
|---|---|---|---|---|
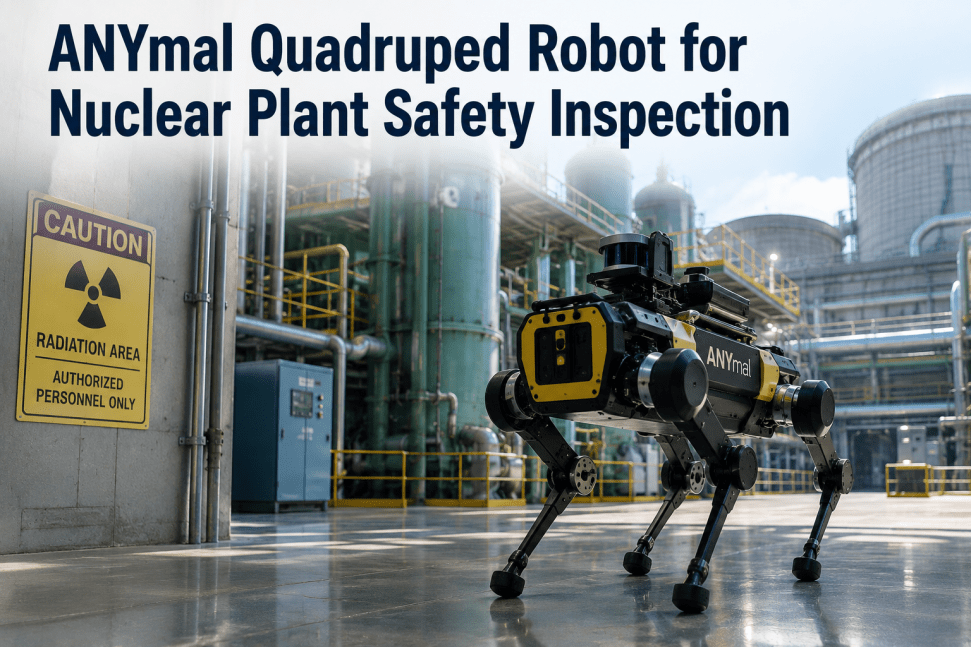
| Quadruped (Spot) | Stairwells, turbine decks, uneven terrain, confined pipe galleries | 360° LiDAR, thermal camera, gas sniffer, microphone array | 2–4 hrs continuous, 12 km | Daily patrols + event-triggered re-inspection |
| Inspection Drone | Boiler stacks, cooling towers, elevated pipe racks, switchyard buswork | 4K EO, radiometric thermal, ultrasonic thickness (contact probe) | 20–30 min per flight, 2 km radius | Weekly aerial sweep + post-storm assessment |
| Magnetic Crawler | Boiler tube walls, storage tank exteriors, steel chimney liners | MFL array, UT thickness gauge, visual camera, temperature probe | Continuous 8 hrs on vertical steel surfaces | Monthly thickness mapping + outage-focused runs |
| ATV/AMR Ground Rover | Cooling water tunnels, ash ponds, large floor areas, outdoor yard patrol | RTK GPS, 360° camera, gas detector, ground-penetrating radar | 6–8 hrs, 20 km on flat terrain | Weekly route-based patrol + targeted investigation |
Single-Robot vs. Multi-Robot Fleet: The Operational Gap
The difference between single-robot deployments and orchestrated multi-robot fleets is not incremental — it is structural. Plants running a single platform typically cover only 30–40% of inspectable assets within a campaign window, leaving critical zones unmonitored for weeks or months. Multi-robot orchestration closes that gap completely. Book a Demo to see how iFactory's fleet management platform delivers coordinated inspection across every zone.
- One robot deployed per shift, zone visited serially
- Limited by robot morphology — no stair or vertical surface access
- Single sensor modality per deployment run
- Data siloed on robot, manually offloaded post-mission
- No conflict awareness between in-flight drone and ground robot
- Inspection frequency dictated by robot availability, not risk priority
- Fleet scaling requires separate software for each robot vendor
- No unified mission replay or cross-robot data correlation
- Quadruped, drone, crawler, and rover inspect in parallel
- Each zone matched to optimal robot morphology automatically
- Multi-modal fusion — thermal, visual, acoustic, gas — per inspection pass
- Real-time data streaming to central digital twin via 5G/private LTE
- Airspace and floor-space deconfliction managed by orchestration layer
- AI-driven scheduling prioritizes zones by criticality and defect history
- Single API controls all robots regardless of OEM
- Cross-robot data correlated on unified timeline for forensic replay
One Platform. Every Robot. Full Coverage.
iFactory unifies mission planning, live telemetry, anomaly detection, and cross-robot data correlation into a single operations interface purpose-built for industrial robot fleets.
Expert Perspective on Multi-Agent Fleet Coordination
Dr. Rajesh Menon, former Director of Robotics at a top-10 utility operator and now Principal Robotics Architect at iFactory, shares his perspective on the practical realities of deploying multi-robot fleets in operating power plants.
Deconfliction Is the Hardest Engineering Problem
"The biggest mistake teams make is treating multi-robot coordination as a software integration problem. It is a real-time safety problem. When a drone loses GPS in a turbine hall and a quadruped is executing a pre-planned patrol route in the same volume, the orchestration layer must resolve that conflict in under 200 milliseconds — otherwise you have a collision with a $1M asset. iFactory's platform uses a spatial-temporal deconflict ion engine that pre-checks all mission trajectories against live robot poses before releasing any motion command."
Data Fusion Changes the Inspection Paradigm
"Once you have four robots streaming thermal, visual, acoustic, and gas data onto a common timeline with sub-second synchronization, you can detect failure modes that no single sensor can catch. For example, we correlated a vibration anomaly from a quadruped's accelerometer with an ultrasonic thickness reading from a crawler on the same steam line and identified active wall thinning three months before it would have been found in a scheduled outage."Book a Demo
Start Heterogeneous, Not Homogeneous
"The utilities that succeed with fleet deployments start with two different robot types from day one — typically a quadruped and a drone — and force the orchestration layer to handle heterogeneity immediately. Starting with a homogeneous fleet of identical robots delays the hard integration problems and often leads to a system that cannot accept a third robot type without a major re-architecture.
4-Phase Fleet Deployment Roadmap
Deploying a multi-robot inspection fleet in an operating power plant follows a structured four-phase sequence. Each phase delivers measurable capability before progressing to the next, ensuring that safety, data quality, and operator confidence compound over time.
Phase 1: Zone Survey & Robot Selection (Weeks 1–4)
Conduct a physical and digital survey of all plant zones — turbine hall, boiler structure, cooling towers, switchyard, pipe racks, water tunnels, and chemical storage. For each zone, document access constraints, environmental hazards, communication coverage, and inspection frequency requirements. Select robot morphologies that map to zone characteristics: quadrupeds for stair-heavy turbine buildings, drones for vertical boiler stacks, magnetic crawlers for tank farms, and AMRs for outdoor yard patrol routes.
Phase 2: Simulation & Mission Planning (Weeks 5–8)
Import plant CAD and laser-scan data into the iFactory digital twin environment. Simulate multi-robot missions across all zones to validate deconfliction algorithms, communication handoffs, and battery range constraints. Define mission templates for daily patrol, weekly sweep, monthly thickness mapping, and event-triggered inspection. Establish failover protocols for communication loss, robot down, or zone inaccessibility.
Phase 3: Pilot Deployment & Baseline (Weeks 9–16)
Deploy the initial fleet in a contained subset of plant zones — typically the turbine hall and adjacent switchyard. Run coordinated missions for eight weeks to establish baseline coverage metrics, defect detection rates, and fleet uptime statistics. Collect operator feedback on the orchestration interface and refine mission templates based on real-world environmental conditions, including weather interference with drone operations and traction variations on wet surfaces.
Phase 4: Full Fleet Scaling & Continuous Improvement (Weeks 17+ )
Expand fleet operations to all plant zones with zone-specific mission schedules. Activate cross-robot data fusion pipelines and AI-driven anomaly correlation across thermal, visual, acoustic, and gas datasets. Establish a monthly fleet performance review that tracks coverage completion percentage, defect discovery rate, mission execution reliability, and safety incident avoidance. Use trend data to optimize robot allocation, battery charging schedules, and inspection frequency by zone criticality.Book a Demo
Deploy a Coordinated Robot Fleet Across Your Entire Plant
iFactory gives power plant operators a unified platform for multi-robot mission planning, real-time fleet coordination, cross-robot data fusion, and AI-driven anomaly detection — purpose-built for heterogeneous inspection fleets in critical infrastructure environments.
Multi-Robot Collaboration for Power Plant Inspection — Frequently Asked Questions
How do multi-robot fleets handle communication loss in underground or metal-rich zones?
iFactory's orchestration layer supports mesh networking with store-and-forward fallback. Each robot carries an onboard mission buffer that allows it to complete its current inspection segment autonomously if communication is lost. When connectivity is restored, the robot automatically syncs all collected data, pose history, and diagnostic logs. For persistent dead zones such as boiler cavities and water tunnels, plants deploy distributed 5G or Wi-Fi 6 relay nodes along the inspection route as part of the infrastructure readiness phase.
Can the same fleet coordinate across both indoor turbine halls and outdoor switchyards?
Yes. The iFactory platform handles mixed indoor-outdoor operations through a unified spatial map that automatically switches between GPS and visual-inertial odometry localization as robots transition through doorways or covered passages. The orchestration engine maintains a single mission timeline regardless of localization domain, and robots are automatically assigned the correct positioning mode based on their current zone.
What happens if one robot in the fleet fails mid-mission?
The orchestration layer detects the failure within seconds via heartbeat monitoring and automatically re-routes the failed robot's remaining inspection waypoints to the nearest capable robot in the fleet. If no robot can accept the additional waypoints due to battery or capability constraints, the mission segment is flagged as incomplete and the zone is prioritized for the next scheduled sortie. All data collected by the failed robot up to the point of failure is preserved and synced on reconnection.
How does iFactory integrate with existing robot vendors like Boston Dynamics, DJI, or Gecko Robotics?
iFactory's Robotics Integration platform exposes a universal API layer that abstracts vendor-specific control interfaces into a standardized robot command set. Integration with Boston Dynamics Spot, DJI drones, and Gecko Robotics magnetic crawlers is already available out of the box. For custom or legacy robots, iFactory provides an SDK that enables integration within two to four weeks depending on the robot's API maturity. The platform handles all cross-vendor differences in telemetry formatting, motion semantics, and data output schemas transparently.Book a Demo
What is the typical ROI of deploying a multi-robot inspection fleet in a combined-cycle gas plant?
For a typical 500 MW combined-cycle facility replacing 60% of manual inspection hours with a quadruped-drone-crawler fleet, customers report annual savings of $1.8M–$3.2M from reduced manual inspection labor, fewer outage extensions due to late-discovered defects, and lower safety incident costs. ROI is typically achieved within 10–14 months of full fleet deployment. The largest single value driver — avoiding a forced outage — can justify the entire fleet investment in a single event.