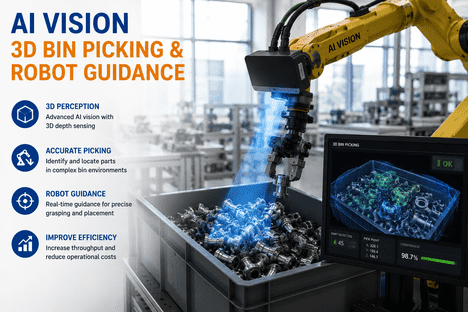
Automating the handling of randomly oriented, loosely piled, and variably positioned parts has been one of industrial robotics' most persistent unsolved problems — the challenge that separates robots from human hands in flexibility, and the reason that so many manufacturing and logistics operations still depend on manual labor for loading, unloading, feeding, and assembly tasks that every other part of the production system has already automated. AI vision 3D bin picking and robot guidance changes this equation fundamentally. By combining structured light or stereo 3D cameras with edge-deployed deep learning object detection models, modern vision-guided robotic systems can locate any part in a bin regardless of how it arrived there, calculate a collision-free grasp pose in three-dimensional space, guide the robot arm to the correct pick position with sub-millimeter precision, and repeat this cycle hundreds of times per hour without a fixture, a parts feeder, or a human hand touching the process. In 2026, the global bin picking system market stands at $2.25 billion and is expanding at 12.5% annually — driven by automotive, electronics, logistics, and heavy industrial operations where labor shortages, throughput demands, and quality consistency requirements are simultaneously making the economics of fixtureless robotic automation more compelling than at any point in manufacturing history. iFactory's AI vision object detection platform delivers the 3D scene understanding, grasp pose estimation, and robot guidance outputs that make this automation possible across a wide range of part geometries, material types, and bin configurations — without the multi-month programming and fixture engineering cycles that traditional robot guidance approaches have historically required.
Why Traditional Robot Guidance Cannot Handle Random Part Presentation
Conventional robotic pick-and-place systems work by programming the robot to move to a precisely known location where a precisely oriented part will always be found — assumptions that require fixtures, vibratory bowl feeders, trays, pallets loaded in exact sequences, and a chain of upstream operations dedicated to presenting parts in the configuration the robot was programmed to handle. When any link in this chain breaks — a part arrives in a different orientation, a bin is loaded slightly off-center, or a new variant enters the product mix — the robot stops, and a human intervention is required to restore the controlled conditions the system depends on. This brittleness is the fundamental constraint that has kept robotic automation out of the parts handling, machine loading, and assembly feeding applications where labor is most intensively used. AI vision 3D bin picking removes this constraint by enabling robots to perceive and respond to the actual scene in front of them rather than the scene they were programmed to expect. Industrial 3D cameras capture a complete point cloud of the bin contents in under half a second — providing depth information for every surface visible from the camera position. AI object detection models process this point cloud to locate every instance of the target part, estimate its six-degree-of-freedom pose in three-dimensional space, rank accessible pick candidates by grasp quality and collision risk, and output the highest-confidence grasp pose to the robot controller in time for the robot arm to execute the pick within the cycle time constraint. The robot does not need to be retrained when parts arrive in a different order, when the bin fill level changes, or when a new batch of parts with slightly different surface properties enters the cell — the AI model handles scene variation as a natural part of its operation rather than an exceptional condition requiring human intervention.
Five AI Vision Capabilities That Power 3D Bin Picking and Robot Guidance
iFactory's AI vision object detection platform delivers a complete pipeline from 3D scene capture through robot guidance output — covering every processing stage required to convert a camera image of a bin of randomly oriented parts into a precise, executable pick instruction for the robot controller. Each capability is edge-deployed with sub-50ms inference latency, operating without cloud connectivity requirements on NVIDIA GPU hardware at the robotic cell. Automation engineers and production managers ready to see this pipeline demonstrated on their specific part geometries can Book a Demo with iFactory's robotics vision team.
3D Point Cloud Generation and Scene Reconstruction
iFactory's platform supports structured light, active stereo, and time-of-flight 3D camera technologies to generate high-density point clouds of bin contents — capturing the x, y, and z coordinates of every visible surface point within the imaging volume in under 500 milliseconds. The point cloud captures depth information that reveals part positions buried beneath other parts, orientation angles invisible to 2D cameras, and the spatial relationships between adjacent parts that determine whether a specific pick candidate is accessible to the robot arm without collision. Point cloud quality determines the upper bound on downstream pose estimation accuracy — iFactory's 3D scene reconstruction pipeline includes noise filtering, outlier removal, and surface normal estimation that conditions raw sensor data into the clean geometric representation that AI pose estimation models require for reliable operation across the full range of part fill levels and presentation conditions encountered in production.
AI Object Detection and 6-DOF Pose Estimation
Deep learning object detection models process the 3D point cloud to locate every instance of the target part — identifying part positions and orientations even when parts are partially occluded by adjacent parts, when surfaces are textureless or reflective, or when lighting conditions at the bin floor create lower-confidence detections for deeply buried parts. For each detected part instance, the AI model estimates the full six-degree-of-freedom pose — three position coordinates and three rotation angles — that defines how the part is oriented in space and what approach path the robot gripper must follow to achieve a stable grasp. Model training uses synthetic data generation from CAD models combined with real-world scan data from the customer's specific parts — reducing the labeled training data requirement and enabling new part types to be added to the detection model in days rather than weeks of data collection.
Grasp Pose Planning and Collision-Free Path Generation
Identifying a part's pose is necessary but not sufficient for a successful pick — the robot gripper must reach the part through a path that avoids collision with the bin walls, adjacent parts, and the gripper's own geometry constraints. iFactory's grasp planning module ranks all detected pick candidates by a composite score combining grasp quality (contact surface area, approach angle stability, gripper closing clearance) and collision risk (proximity to bin walls, obstruction by neighboring parts, gripper approach path clearance). The highest-ranked collision-free grasp pose is output to the robot controller as the pick target, with the next-ranked alternatives held in queue in case the primary pick fails or the robot controller requests an alternative. This ranked grasp queue approach eliminates the single-pick-failure stops that characterize simpler vision guidance systems — the cell continues operating through individual pick failures by advancing to the next viable candidate without human intervention.
Real-Time Robot Controller Integration and Guidance Output
iFactory's platform communicates with robot controllers via standard industrial protocols — including OPC-UA, EtherCAT, and robot-brand-specific interfaces for FANUC, KUKA, ABB, Yaskawa, and Universal Robots — outputting pick pose coordinates in the robot's native reference frame with no intermediate coordinate transformation required from the integration team. The guidance cycle — from 3D scan trigger to pick pose output — completes within the robot's waiting time window at cycle rates consistent with production line requirements. Post-pick scan verification confirms that the part was successfully removed from the bin and triggers an immediate re-scan to update the bin scene model before the next pick cycle, ensuring that the pose estimation used for subsequent picks reflects the actual bin state after each removal event rather than a stale model that no longer matches reality.
Post-Pick Part Verification and Quality Gate Integration
After each pick, iFactory's AI vision system verifies that the correct part was retrieved in the correct orientation before the robot deposits it at the downstream location — catching wrong-part picks, upside-down placements, and damaged parts that entered the bin before the robot deposits them into an assembly station, a machine tool, or a packaging line where a defective part would create a downstream quality event. This in-process verification capability converts the bin picking cell from a part-moving device into a combined handling and quality gate — catching orientation errors, wrong variants, and visible surface defects at the point of handling rather than at the downstream inspection station where the cost of remediation is higher. Part verification results are logged per-pick with timestamped records that support traceability requirements and provide the pick performance data — success rates, rejection rates by defect type, and cycle time distribution — that automation engineers use to optimize cell performance over time.
AI Vision Robot Guidance Across Application Types
iFactory's 3D vision object detection platform addresses five distinct robot guidance application categories — each with different geometric complexity requirements, throughput constraints, and integration demands. Understanding which application category a specific handling challenge falls into determines the appropriate camera configuration, model architecture, and robot interface approach. Automation project managers evaluating which application category their handling challenge falls into can Book a Demo to walk through an application-specific feasibility assessment with iFactory's robotics vision engineers.
| Application Type | Part Presentation | Vision Requirement | Typical Industries | iFactory Capability |
|---|---|---|---|---|
| Random Bin Picking | Loosely piled, random orientation, fully mixed | Full 6-DOF pose estimation, grasp planning | Automotive, electronics, metal fabrication | 3D point cloud + deep learning pose |
| Depalletizing | Layered, known height variation, mixed SKU possible | Layer detection, pick sequence planning | Logistics, food and beverage, warehousing | Real-time layer mapping + pick order |
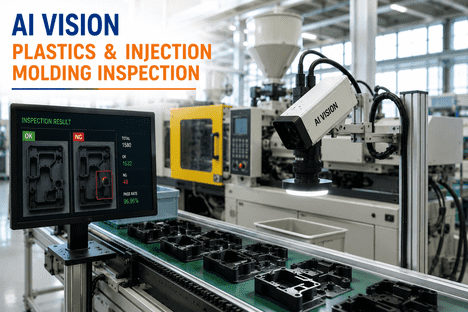
| Machine Tending | Partially organized, fixture-free loading required | Precise pose for CNC/press/mold loading | Machining, stamping, injection molding | Sub-mm placement guidance output |
| Assembly Feeding | Singulated or semi-random, orientation-critical | Orientation verification before assembly | Electronics assembly, automotive sub-assembly | Pose + orientation verification per pick |
| Kitting and Order Picking | Multi-SKU bins, pick-by-order sequence | SKU identification + quantity verification | Aftermarket, spare parts, e-commerce fulfillment | Multi-class detection + count verification |
How iFactory AI Vision Eliminates Fixtures and Parts Feeders
The economic case for AI vision robot guidance is strongest when evaluated against the full cost of the fixture and parts feeder infrastructure it replaces — not just the direct cost of the vision system itself. A traditional robotic handling cell for a single part type typically requires a vibratory bowl feeder sized for that part's geometry, a linear track or escapement mechanism to singulate and orient parts, and a robot programmed to pick from a fixed, known position. When the part changes — a design revision, a new supplier with different surface finish, or a model year changeover — the bowl feeder must be rebuilt or replaced, the escapement must be re-machined, and the robot program must be retaught. In high-mix manufacturing environments where dozens of part numbers share handling cells, this fixture dependency creates change-over time, tooling inventory costs, and scheduling constraints that directly limit production flexibility. AI vision 3D bin picking eliminates the fixture dependency by making the robot adaptive rather than programmatic. The 3D vision system handles every orientation the part can assume without a fixture — and when the part changes, the AI model is retrained on new scan data rather than a new bowl feeder being manufactured. Changeover from one part number to another in a vision-guided bin picking cell takes minutes of model loading time rather than hours or days of mechanical changeover. For high-mix, low-volume manufacturers where product variety is a competitive advantage, this fixture-free flexibility represents a structural capability that fixed automation fundamentally cannot provide. Manufacturing leaders evaluating this transition can Book a Demo to see iFactory's fixtureless handling capability demonstrated on representative parts from their own production portfolio.
3D bin picking cycle time is directly constrained by the time the robot spends waiting for the vision system to return a pick pose after the 3D scan is captured. Cloud-based AI inference adds network round-trip latency to the processing time — typically 100–500ms of additional wait time per pick cycle that compounds across every pick in a production shift. iFactory's AI vision platform processes all 3D point cloud data and pose estimation inference on NVIDIA GPU edge hardware deployed at the robot cell, achieving total vision cycle times — from scan trigger to pick pose output — in the 200–400ms range that keeps the robot waiting fraction seconds rather than seconds between picks. At a production rate of 600 picks per hour, a 300ms vision latency difference equals 180 seconds of additional idle robot time per hour — time that accumulates to measurable throughput loss across a production shift and is entirely preventable with edge AI deployment. iFactory's edge architecture also ensures that robotic cell operation is unaffected by network outages or cloud service disruptions — a reliability requirement that safety-critical production applications cannot accept being exposed to.
Implementation Roadmap: Deploying AI Vision 3D Bin Picking in Four Phases
Deploying AI vision 3D bin picking follows a structured sequence that moves from application feasibility through model training, cell integration, and production validation — delivering a production-ready system in weeks rather than the months that traditional robot guidance programming approaches require. The following roadmap reflects deployment patterns validated across automotive, electronics, logistics, and general manufacturing bin picking installations.
Application Feasibility Assessment and Camera Configuration (Week 1–2)
Assess the target parts, bin dimensions, required cycle time, and robot platform to determine the appropriate 3D camera technology — structured light for high-accuracy metal part applications, stereo for larger parts in variable lighting environments, or time-of-flight for high-speed depalletizing applications where capture speed is the primary constraint. Evaluate part surface properties including reflectivity, texture level, and color variation that affect point cloud quality, and define any supplementary lighting requirements. Produce a feasibility report confirming the cycle time, accuracy, and coverage capability of the proposed configuration before hardware procurement or robot cell modification begins.
AI Model Training and Grasp Configuration (Weeks 3–6)
Train the object detection and pose estimation model on the target part using a combination of synthetic data generated from the part's CAD model and real-world scan data captured from physical parts in representative bin fill conditions. Configure grasp point definitions — the preferred contact surfaces, approach vectors, and gripper orientation constraints — in the grasp planning module. Validate model performance against a test dataset covering low fill level, high fill level, mixed orientation, and partial occlusion conditions before proceeding to cell integration. Model accuracy targets are confirmed against the customer's specific pick success rate requirements — typically 95%+ pick success at production cycle time — before the integration phase begins.
Robot Cell Integration and Hand-Eye Calibration (Weeks 7–10)
Mount the 3D camera in the configured position above the bin — either on a fixed overhead mount or on the robot arm for eye-in-hand configurations — and complete hand-eye calibration to establish the precise transformation between camera coordinates and robot world coordinates. Configure the robot controller interface using the appropriate protocol for the specific robot brand, and implement the pick cycle logic that sequences scan trigger, pose retrieval, grasp execution, post-pick verification, and bin re-scan into the robot program. Validate the complete cycle — from scan trigger to successful pick and place — under controlled conditions before transitioning to full production trial running.
Production Trial, Performance Validation, and Continuous Improvement (Weeks 11–16)
Run the system under actual production conditions across the full range of bin fill levels, part batches, and shift patterns encountered in the deployment environment. Log pick success rate, cycle time distribution, empty bin detection accuracy, and post-pick verification results for the first four weeks of production operation. Use the pick performance data to identify conditions generating below-target success rates — specific fill levels, part orientations, or lighting transitions that benefit from model refinement — and update the detection model accordingly. Establish the ongoing performance monitoring dashboard and model update cadence that maintains system accuracy as part geometry, surface finish, or bin configuration changes over the product lifecycle.
Frequently Asked Questions: AI Vision 3D Bin Picking and Robot Guidance
iFactory's robot guidance platform supports FANUC, KUKA, ABB, Yaskawa/Motoman, and Universal Robots via native robot controller interfaces including FANUC Karel, KUKA KISS, ABB RAPID, and UR Script, with pick pose coordinates output in each robot's native reference frame. OPC-UA and EtherCAT interfaces are available for robot controllers and PLC-based handling systems that support standard industrial communication protocols. Robot brand support is confirmed during the feasibility assessment phase before hardware procurement.
Reflective and textureless surfaces are the most challenging conditions for 3D vision-based bin picking — they produce specular reflections that saturate structured light patterns and reduce point cloud density in the affected areas. iFactory addresses this through camera technology selection — active stereo systems with speckle-free illumination perform better on metallic surfaces than structured light systems — combined with supplementary polarized lighting configurations that reduce specular reflection intensity at the sensor. For deeply challenging reflective parts, spray-on matte coating during the feasibility phase quantifies the performance improvement that surface treatment would provide, informing the customer's decision between optical mitigation and part surface modification.
Production pick success rates depend on part geometry, surface properties, bin fill level range, and gripper design — but well-configured AI vision bin picking cells targeting a single part type with appropriate grippers typically achieve 95–98% pick success rates under standard operating conditions. The 2–5% of cycles that do not produce a successful first pick are handled by the grasp queue system advancing to the next-ranked pick candidate, keeping the cell operating without human intervention in most cases. Deeply occluded parts at very low bin fill levels produce the highest per-cycle failure rates — the solution is empty bin detection that triggers automatic bin exchange before fill level falls to the point where success rates degrade below acceptable thresholds.
Yes. iFactory's multi-class object detection models can be trained to recognize and differentiate multiple part types within the same bin — outputting part identity alongside pose for each detected pick candidate. This enables mixed-bin kitting applications where the robot selects specific part types from a common bin, and sorted depalletizing applications where the robot must classify each item before placing it in the correct destination lane. Multi-class performance depends on the visual similarity between part types — distinctly different geometries are reliably separated; nearly identical parts that differ only in minor dimensional features require higher-resolution imaging and more targeted training data to achieve production-grade discrimination accuracy.
AI vision bin picking deployments replacing manual parts handling operations typically achieve full ROI within 12–24 months through direct labor cost reduction — calculated against the headcount previously required to perform loading, unloading, and feeding tasks at the automated cell. Facilities deploying bin picking to address labor shortages rather than pure cost reduction often justify the investment on availability grounds — the robot can staff the third shift and weekend operations that human labor cannot sustain, eliminating the throughput gap that limited production capacity. Additional ROI factors include elimination of vibratory feeder and fixture maintenance costs, reduced changeover time on high-mix production lines, and quality improvement from consistent handling versus variable human technique. Operations evaluating their specific ROI case can discuss production volumes, current labor rates, and parts mix when they Book a Demo with iFactory's automation team.