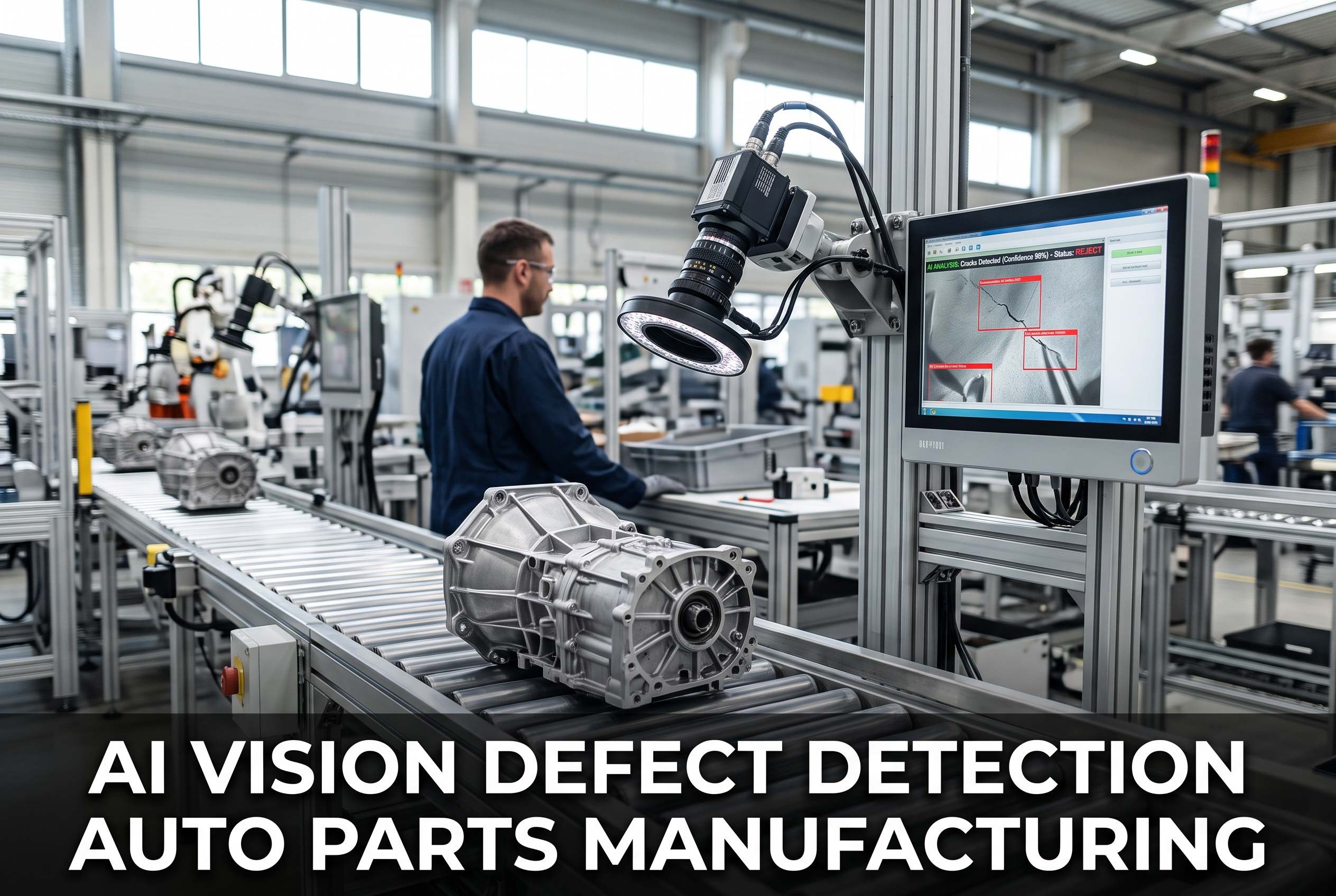
Autonomous inspection robots are transforming how manufacturing facilities detect defects, monitor equipment condition, and enforce quality standards across production environments that are too large, too hazardous, or too variable for fixed-camera systems to cover comprehensively. The intelligence layer that makes these robots capable of autonomous operation — the ability to navigate a production floor, identify inspection targets, assess surface condition, classify defects, and report anomalies without human guidance — is the AI Vision Camera system mounted on the robot platform. Without an AI vision system capable of real-time defect classification and environmental awareness, an inspection robot is simply a mobile platform with no analytical capability. With the right AI vision architecture, that same robot becomes an autonomous quality engineer that operates continuously across every shift, every zone of the facility, and every product variant in the production mix. iFactory's AI Vision Camera platform is designed to serve as the perception and inspection intelligence layer for autonomous inspection robot deployments — providing the defect detection accuracy, edge processing performance, and multi-model management capability that autonomous inspection demands. Book a Demo to see how iFactory's AI vision technology integrates with autonomous inspection robot platforms.
Why AI Vision Cameras Are the Core Technology Enabling Autonomous Inspection
An autonomous inspection robot's value is entirely determined by the quality of the decisions its AI vision system makes in real time. Navigation autonomy — the ability to move without collision through a production environment — is a solved problem for most modern robot platforms. The unsolved, high-value problem is inspection autonomy: the ability to look at a surface, component, or process zone and determine with reliable accuracy whether it conforms to quality specification. This requires an AI vision system with defect classification capability that matches or exceeds the accuracy of the human inspectors it replaces, combined with the processing speed to generate inspection decisions at the pace of robot movement without creating latency that stops the robot at every inspection point. iFactory's edge-deployed AI Vision Camera architecture delivers both requirements in a single integrated system that mounts directly on standard robot platforms.
The Five AI Vision Capabilities That Autonomous Inspection Robots Require
Not every AI Vision Camera system is architecturally suited for autonomous inspection robot deployment. Fixed-station vision systems are designed around controlled, repeatable imaging conditions — constant lighting, fixed working distance, predictable product presentation. An autonomous inspection robot operates in none of these conditions: lighting changes as the robot moves between facility zones, working distance varies with surface irregularities and robot positioning accuracy, and the inspection targets change with every zone of the facility patrol route. The AI vision system on an autonomous inspection robot must handle all of this variability while maintaining the detection accuracy specified for each inspection task. These five capabilities are the architectural requirements that differentiate AI vision systems suited for robot-mounted deployment from those that are not.
Variable Condition Robustness — Lighting and Distance Adaptation
A fixed-station AI vision camera is trained and calibrated for a single, controlled imaging environment. An inspection robot's camera must produce reliable inspection decisions across the full range of facility lighting conditions encountered on the patrol route — from well-lit packaging areas to dimly lit mechanical service corridors — and at working distances that vary by centimetres depending on surface geometry and robot positioning precision. iFactory's AI vision models for robot-mounted deployment are trained on image datasets that explicitly include the lighting and distance variation expected across the robot's operational environment, making the model robust to conditions that would generate excessive false positives in a fixed-station model trained on uniform data.
On-Robot Edge Processing — Zero Wireless Dependency in the Inspection Path
Autonomous inspection robots operating in large manufacturing facilities traverse zones with variable Wi-Fi coverage — and in metal-dense production environments, wireless connectivity gaps are frequent. An AI vision system that depends on wireless transmission to a remote inference server cannot operate reliably in these environments: any connectivity gap creates an inspection coverage gap. iFactory's edge-deployed AI vision architecture runs the full inference model on hardware mounted on the robot platform — generating inspection decisions in 8 to 22 milliseconds without any wireless network involvement in the processing path. Wireless connectivity is used only for transmitting completed inspection records and alerts to the facility management system — a non-real-time function that tolerates connection gaps without affecting inspection performance.
Zone-Based Model Switching — Different Defect Models for Each Patrol Zone
An autonomous inspection robot patrolling a food manufacturing facility encounters fundamentally different inspection tasks in different zones — label and cap inspection in the packaging area, surface condition monitoring in the filling zone, equipment condition assessment in the utility corridor, and foreign object detection in the raw material handling area. Each inspection task requires a different AI vision model trained on the specific defect types relevant to that zone. iFactory's multi-model deployment architecture allows the robot to switch the active inference model automatically as it transitions between patrol zones — loading the appropriate defect classification model from the on-robot model library based on GPS position or zone marker detection, without any manual configuration change or remote intervention. Book a Demo to see iFactory's zone-based model switching system in action on a live robot deployment.
Anomaly Localization — Precise GPS-Tagged Defect Reporting
The operational value of an autonomous inspection robot's defect detection is only realised when the maintenance or quality team can locate and address the detected anomaly efficiently. A robot that reports "surface defect detected" without precise location information forces the response team to search a large area — eliminating most of the efficiency gain that autonomous patrol is supposed to deliver. iFactory's AI vision system generates inspection records that include the GPS coordinates or facility grid reference of every detected anomaly, along with the image evidence, defect classification, and confidence score. This enables the facility management dashboard to display detected anomalies as a mapped heat map of the production floor — giving the quality team a precise, actionable response target for every alert generated during the robot's patrol cycle.
Continuous Learning Integration — Improving Detection Accuracy Through Patrol Data
Each patrol cycle generates thousands of labelled inspection images under the actual environmental conditions of the specific facility. This data is an asset for model improvement that fixed-station systems with limited data variety cannot match. iFactory's platform captures robot-generated inspection data and routes confirmed defect and non-defect examples into a structured model improvement workflow — enabling periodic retraining cycles that progressively improve detection accuracy on the specific defect types and environmental conditions of the facility being patrolled. Over successive retraining cycles, the model becomes increasingly calibrated to the facility's specific anomaly profile — improving detection rates on rare or subtle defect types that require facility-specific training data to classify reliably.
Autonomous Inspection Robot Applications: Where AI Vision Delivers Maximum Facility Value
The production environments where autonomous inspection robots powered by AI Vision Cameras deliver the highest operational value share a common characteristic: they are inspection tasks where human coverage is incomplete, inconsistent, or hazardous — creating quality and safety gaps that a continuously patrolling robot system eliminates structurally. The following application categories represent the highest-priority deployment scenarios for autonomous inspection robot programs in food, beverage, pharmaceutical, and general manufacturing environments.
End-of-Line Quality Patrol in High-Volume Packaging
High-volume packaging lines produce thousands of units per hour across multiple parallel lines — a coverage density that fixed inspection stations can match at individual inspection points but cannot cover comprehensively across the full line footprint, including accumulated product on conveyors, in staging buffers, and at transfer points. Autonomous inspection robots performing end-of-line quality patrols cover these transition zones continuously, detecting label placement errors, cap defects, fill level anomalies, and packaging damage at locations that fall between fixed camera coverage zones.
Equipment Condition Monitoring in Hazardous or Inaccessible Zones
Process equipment operating in high-temperature, high-pressure, or chemically aggressive environments presents inspection access challenges that limit the frequency and quality of human visual assessment. Autonomous inspection robots equipped with thermal and visual AI vision cameras can patrol these environments continuously — detecting heat exchanger surface anomalies, pipe insulation degradation, seal failures, and corrosion development at inspection intervals that human programs cannot match. iFactory's AI vision models for equipment condition monitoring are trained to detect the specific visual indicators of equipment degradation relevant to each equipment class in the patrol route.
Foreign Object and Contamination Detection in Production Zones
Foreign object contamination in food and pharmaceutical manufacturing is a product safety risk with severe regulatory and commercial consequences. Autonomous inspection robots performing regular production zone patrols detect foreign objects — packaging materials, tools, personal items, or raw material fragments — on production surfaces, on product contact equipment, and in raw material staging areas. The robot's AI vision system classifies detected objects against an approved reference set, flagging anomalies for immediate investigation while confirming the presence of expected zone contents such as cleaning equipment and approved containers.
GMP Compliance Verification Across Production and Sanitation Zones
GMP compliance in food and pharmaceutical manufacturing requires continuous verification that production zones conform to cleanliness, organisation, and personnel behaviour standards. Autonomous inspection robots performing GMP patrol cycles use AI vision to detect compliance deviations — unclean surfaces, misplaced equipment, open containers, and improper material staging — across facility zones that receive only periodic human audit coverage. The robot generates a timestamped visual compliance record for each patrol cycle, providing the continuous audit evidence that episodic human inspections cannot supply and that increasingly sophisticated regulatory frameworks require.
Warehouse and Inventory Condition Assessment
Finished goods warehouses and raw material storage facilities present inspection challenges that traditional quality programs address only at inbound and outbound gates — missing the packaging deterioration, labelling errors, and storage condition deviations that develop during storage. Autonomous inspection robots performing regular warehouse patrols use AI vision to detect damaged packaging, incorrect storage configurations, missing or incorrect labels, and product segregation failures — generating actionable quality flags before affected inventory reaches the despatch gate or the production floor.
After-Shift Sanitation Verification and Pre-Production Clearance
Pre-production sanitation verification — confirming that production zones meet cleanliness standards before the first product run of each shift — is a critical but time-intensive process in food manufacturing. Autonomous inspection robots performing post-sanitation patrol cycles use AI vision to detect sanitation deficiencies — residual product, cleaning chemical residue, standing water, and equipment not returned to clean configuration — across the full production zone footprint faster and more consistently than manual inspection teams can achieve. The robot generates a pre-production clearance record for each patrol zone, providing documented sanitation verification that satisfies GFSI scheme requirements and supports FSMA compliance programs.
AI Vision Camera Technical Requirements for Robot-Mounted Deployment
Selecting an AI Vision Camera system for autonomous inspection robot deployment requires evaluating technical specifications against the specific challenges of mobile platform operation — not the specifications that matter for fixed-station systems. Camera weight and power consumption affect robot payload and battery endurance. Vibration resistance determines whether the camera maintains calibration during robot movement. Processing architecture determines whether the system can generate inspection decisions fast enough to support continuous robot traverse without mandatory stop-and-inspect pauses. iFactory's robot-mounted AI vision configurations are specified to meet these mobile platform requirements while delivering the detection accuracy performance of full-capability fixed-station systems. Facilities evaluating robot-mounted AI vision specifications can Book a Demo for a hardware specification review as part of iFactory's robot integration scoping process.
| Specification Category | Fixed-Station Requirement | Robot-Mounted Requirement | iFactory Robot Configuration |
|---|---|---|---|
| Inference Latency | <50ms — line speed determines limit | <25ms — enables continuous traverse at 0.5 m/s | 8–22ms on-robot edge hardware |
| Vibration Resistance | IEC 60068-2-6 basic specification | IEC 60068-2-64 random vibration — robot motion profile | Shock-mounted camera and edge unit assembly |
| Working Distance Tolerance | Fixed ± 5mm from calibrated distance | Adaptive ± 50mm — variable surface distance | Distance-adaptive focus and exposure control |
| Lighting Condition Range | Single controlled lighting configuration | 100–10,000 lux ambient range — variable by zone | Auto-exposure with zone-specific baseline profiles |
| Wireless Dependency | Wired network — no wireless requirement | Zero wireless dependency in inspection path | Full on-robot edge inference — wireless for records only |
| Multi-Model Management | Single model per inspection point | Zone-triggered model switching — up to 20 models | GPS-triggered model library with instant switching |
| Environmental Rating | IP54 standard (dry areas) to IP69K (washdown) | IP65 minimum — splash and dust across all zones | IP65 camera, IP54 sealed edge compute enclosure |
Integrating iFactory AI Vision with Autonomous Inspection Robot Platforms
iFactory's AI Vision Camera system integrates with autonomous inspection robot platforms through a standardised hardware and software interface that minimises robot-level integration complexity — allowing robot platform providers and facility engineering teams to connect AI vision capability without custom software development. The integration architecture separates the AI vision function from the robot navigation and control function — allowing each system to be updated, reconfigured, and maintained independently without affecting the other. This separation is critical for long-term operational sustainability: AI vision model updates driven by inspection performance data do not require robot firmware changes, and robot navigation improvements do not require AI vision reconfiguration. The integration interface includes robot position data input for GPS-triggered model switching and anomaly location tagging, inspection record output for transmission to the facility management system, and alert output for integration with facility notification systems. Facilities deploying autonomous inspection robots and evaluating iFactory's vision integration interface can Book a Demo with iFactory's robot integration engineering team for a platform-specific compatibility review.
Frequently Asked Questions: AI Vision Cameras and Autonomous Inspection Robots
iFactory's robot-mounted vision system uses zone-specific auto-exposure profiles that are activated automatically as the robot transitions between patrol zones — pre-configuring the camera's exposure, gain, and white balance settings for the typical lighting conditions of each zone before the robot enters that zone. Additionally, the AI models used in robot deployments are trained on image datasets captured across the full lighting range expected in each zone, making the detection models inherently robust to the lighting variation that fixed-station models trained on uniform data cannot handle reliably.
iFactory's AI vision system integrates with autonomous inspection robot platforms through standard hardware mounting interfaces and software APIs — not proprietary platform-specific connectors. The vision system requires robot position data input (GPS coordinates or zone identifier) for model switching and anomaly location tagging, and outputs inspection records and alerts through standard network interfaces. This architecture is compatible with the major autonomous inspection robot platforms used in manufacturing environments. A specific compatibility review is conducted during the integration scoping process to confirm interface requirements for the specific robot platform being deployed.
iFactory's on-robot model library supports up to 20 simultaneously loaded inspection models, each associated with a specific patrol zone through GPS coordinates or zone marker detection. A single patrol route covering packaging, processing, utility, and warehouse zones can maintain separate, optimised defect models for each zone — switching between them automatically as the robot progresses through the facility. The model library is managed centrally through iFactory's platform and updated to all robots in the fleet simultaneously through the facility aggregation layer, without requiring manual updates to individual robot units.
Inspection performance is completely unaffected by Wi-Fi connectivity loss because iFactory's inference engine operates entirely on the on-robot edge hardware with no wireless dependency in the inspection processing path. When connectivity is lost, inspection continues normally — the robot generates inspection records and alerts locally on the on-robot storage. When connectivity is restored, queued records are transmitted to the facility management system automatically. Wireless connectivity affects only the real-time dashboard visibility of inspection results and the transmission latency of alert notifications — not the inspection decisions themselves or their local recording.
Every inspection event is tagged with the robot's GPS coordinates or facility grid reference at the moment of image capture — provided by the robot platform's positioning system through the integration interface. When a defect is detected, the inspection record includes the GPS position of the robot at detection, the distance and angle to the inspected surface from that position, and the image evidence with defect classification and confidence score. The facility management dashboard displays all detected anomalies as positioned markers on the facility floor plan, enabling the quality or maintenance team to navigate directly to the precise location of each detected anomaly without area searching.
Each patrol cycle generates inspection images under the actual environmental conditions of the specific facility, creating a continuously growing training dataset that is far more representative of the deployment environment than the initial training data collected before deployment. iFactory's platform captures robot-generated inspection images and routes confirmed anomaly examples — verified by the quality team's investigation of robot alerts — into a structured model improvement queue. At each retraining cycle, the model is retrained on the accumulated facility-specific data, progressively improving detection accuracy on the subtle and facility-specific defect types that generic training datasets cannot represent adequately. This learning loop is one of the most significant long-term value drivers of autonomous inspection robot programs built on iFactory's AI vision platform.