Humanoid robots equipped with embodied AI are transforming equipment health monitoring in warehouse and intralogistics operations by providing autonomous patrols, real-time anomaly detection, and predictive maintenance insights — without adding headcount to the maintenance team. Unlike fixed sensors that monitor single points or manual rounds limited by operator availability, humanoid robots navigate warehouse environments autonomously, access equipment at multiple height levels, capture thermal and acoustic data simultaneously, and integrate equipment health records directly with CMMS and WMS platforms. For warehouse operations managers and reliability engineers evaluating autonomous inspection technology, a structured 12-week pilot roadmap provides the framework to validate equipment health patrol use cases, measure KPI improvements, and build the business case for full deployment. Book a Demo to discuss the humanoid pilot roadmap for your warehouse operation.
01 / The Equipment Health Challenge in Warehouse and Intralogistics Operations
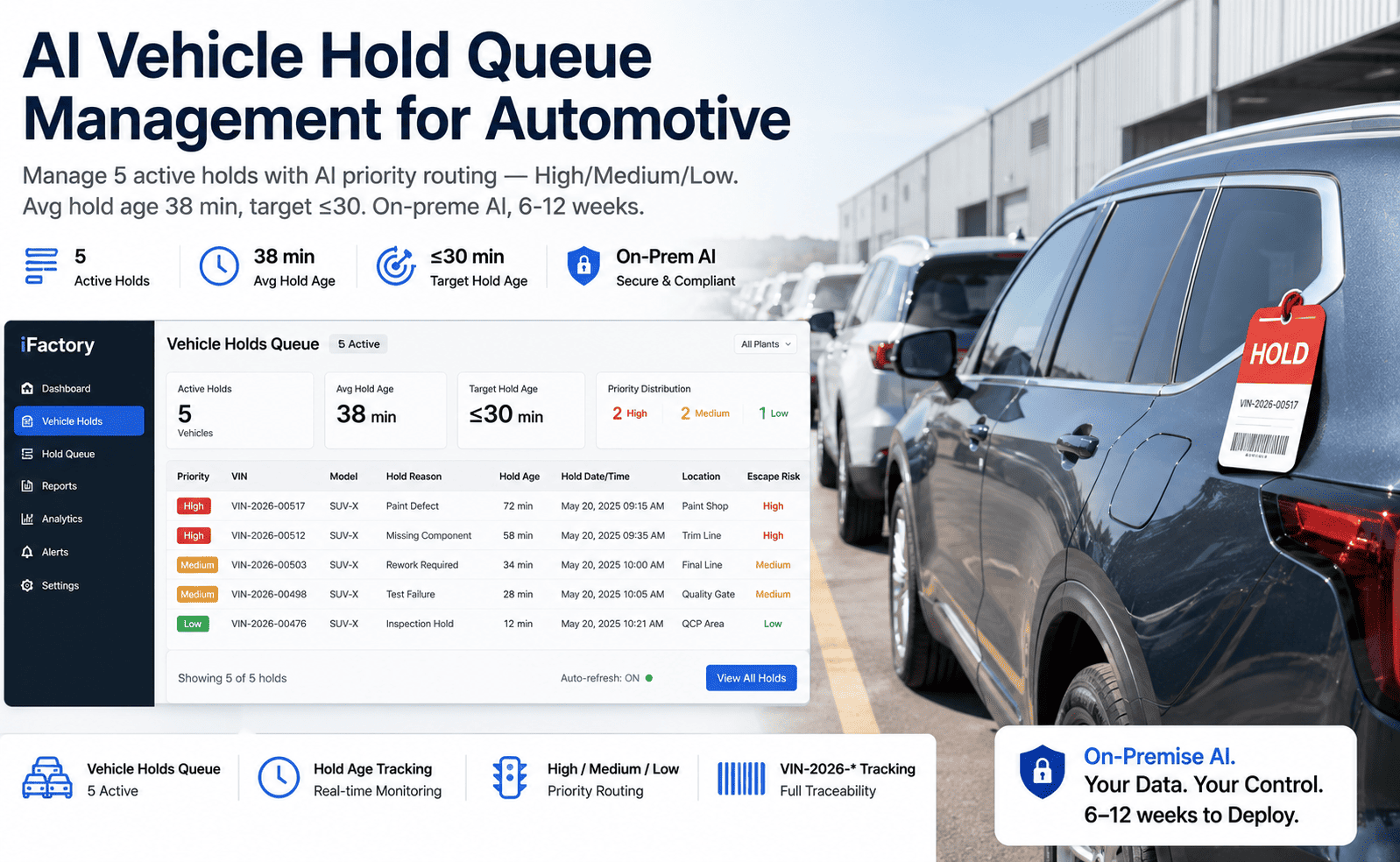
Warehouse operations depend on continuous equipment availability — conveyors, sortation systems, ASRS cranes, forklifts, battery charging stations, compressors, and HVAC units must operate reliably through extended shifts. Yet most warehouses manage equipment health reactively: operators report visible issues, maintenance teams respond after failure, and the gap between onset and detection allows minor anomalies to escalate into costly downtime events. Manual inspection rounds are conducted once or twice per shift and cover only a fraction of available assets. Book a Demo to discuss how humanoid equipment health patrols address these coverage gaps for your warehouse.
| Inspection Aspect | Manual Patrols | Humanoid Robot Patrols | Operational Impact |
|---|---|---|---|
| Patrol Frequency | 1-2 rounds per shift — 4-6 hour gaps between inspections | Continuous autonomous patrols at 30-60 minute intervals — 24/7 coverage | Anomalies detected hours earlier — failure progression interrupted before downtime |
| Detection Methods | Visual inspection, audible noise assessment, limited thermal touch | Thermal imaging, acoustic monitoring, vibration sensing, AI pattern recognition | Sub-surface and early-stage faults detected — not just visible or audible anomalies |
| Data Capture | Paper checklists, verbal handovers, manual log entries | Digital sensor records, timestamped images, trend-capable time-series data | Root cause analysis time reduced — quantitative data replaces subjective observations |
| Coverage Scope | Limited by walk path — typically 40-60% of assets inspected per round | Programmable routes — 95-100% of accessible assets per patrol interval | Previously uninspected equipment included in every patrol cycle |
| Integration | Manual entry into CMMS — 4-24 hour latency from inspection to work order | Real-time CMMS/WMS integration — anomaly triggers work order within seconds | MTTR improved 20-40% through immediate notification and automated escalation |
02 / 12-Week Humanoid Pilot Roadmap — Phased Deployment for Equipment Health Patrols
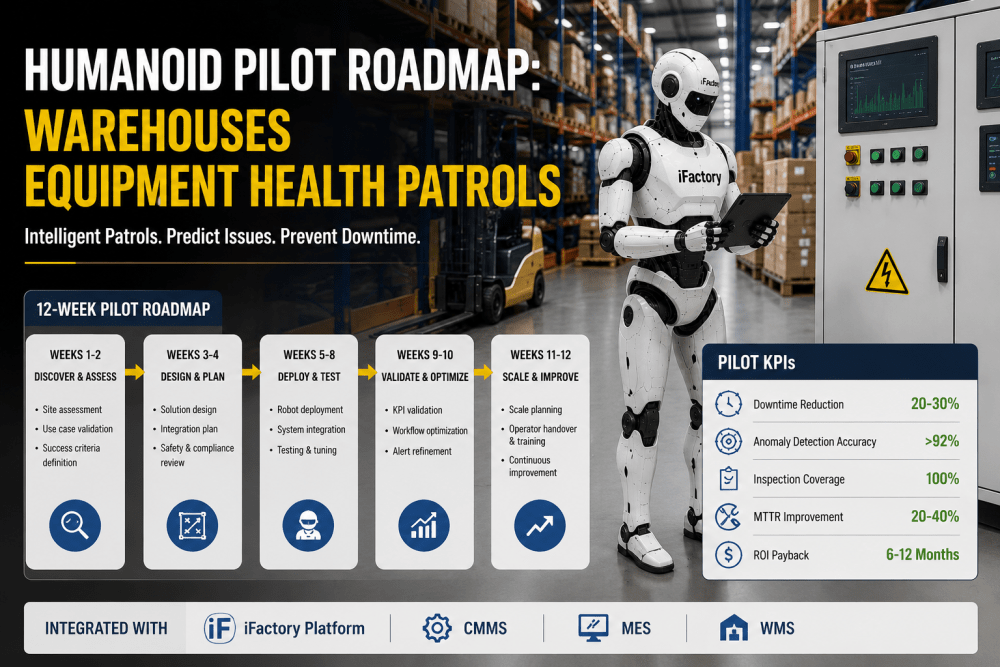
The 12-week pilot roadmap is structured in five phases that progress from site assessment through scale planning. Each phase has defined deliverables, success criteria, and go/no-go decision points. The phased approach enables warehouse operations to validate equipment health patrol use cases with controlled investment before committing to full deployment. Book a Demo to explore the full pilot roadmap for your warehouse.
Weeks 1-2 — Site Assessment and Use Case Validation: The pilot begins with a site assessment that maps the warehouse layout, identifies critical equipment assets, evaluates accessibility and safety requirements, and validates the equipment health patrol use case against current failure modes, maintenance history, and operational priorities. The assessment delivers an asset criticality ranking, a patrol route feasibility analysis, and a prioritized list of use cases for the pilot phase.
Weeks 3-4 — Solution Design and Integration Planning: Based on the site assessment, the solution design phase specifies the humanoid robot configuration, sensor payload requirements, patrol route programming, and CMMS/WMS integration architecture. A safety and compliance review addresses warehouse-specific requirements including pedestrian traffic, equipment interaction zones, and battery charging infrastructure. The phase concludes with a pilot execution plan, integration timeline, and defined success criteria for each KPI.
Weeks 5-6 — Robot Deployment and System Integration: The humanoid robot is deployed in the warehouse environment, patrol routes are programmed based on the site assessment asset map, and the sensor payload is calibrated for the specific equipment types on the route. CMMS and WMS integration connectors are configured and tested — anomaly detection events are validated to generate work orders with correct asset identification, severity classification, and sensor data attachments.
Weeks 7-8 — Testing and Tuning: The system operates in validation mode with parallel manual patrols to establish baseline comparison data. The AI detection models are tuned to the warehouse's specific equipment signatures, and alert thresholds are calibrated to balance detection sensitivity with false positive rate. Patrol route refinements are made based on initial operating experience. The phase concludes with a go/no-go decision based on KPI achievement against success criteria.
Weeks 9-10 — KPI Validation and Workflow Optimization: The equipment health patrol system operates in live mode with full integration. KPI data is collected and validated against baseline metrics — unplanned downtime events, anomaly detection accuracy, inspection coverage percentage, and MTTR improvement. Workflow optimization sessions with the maintenance team refine alert response procedures, escalation rules, and handover reporting formats based on real operating experience.
Weeks 11-12 — Scale Planning and Operator Handover: The final phase delivers a scale deployment plan for expanding equipment health patrols to additional warehouse zones or additional facilities. Operator training is completed with documented standard operating procedures for the humanoid robot system. A continuous improvement framework is established for ongoing model refinement, route optimization, and KPI monitoring. The pilot concludes with a final report documenting KPI achievement, lessons learned, and recommendations for production deployment.
- Asset criticality ranking
- Patrol route mapping
- Success criteria definition
- Robot configuration spec
- CMMS/WMS integration plan
- Safety compliance review
- Robot deployment on-site
- System integration testing
- Detection model tuning
- KPI measurement against baseline
- Alert threshold refinement
- Workflow optimization
- Scale deployment plan
- Operator training & SOPS
- Continuous improvement
03 / Pilot KPIs and Measured Outcomes — Equipment Health Patrol Results
The 12-week pilot is measured against five primary KPIs that directly correlate to warehouse operational performance. The targets below reflect documented outcomes from humanoid equipment health patrol deployments across warehouse and intralogistics environments. Book a Demo to receive a KPI projection specific to your warehouse operation.
| KPI | Baseline (Manual Patrols) | Pilot Target (Humanoid Patrols) | Projected Improvement |
|---|---|---|---|
| Unplanned Downtime | 8-12 events per month from equipment failures detected after escalation | 4-6 events per month — earlier anomaly detection enables planned intervention | 20-30% reduction in unplanned downtime events |
| Anomaly Detection Accuracy | Operator-dependent — estimated 60-75% of early-stage anomalies go undetected | AI model detection accuracy exceeding 92% across all monitored asset types | >92% detection accuracy — consistent, repeatable, operator-independent |
| Equipment Inspection Coverage | 40-60% of critical assets inspected per round — constrained by walk path and time | 95-100% of accessible critical assets inspected on every patrol cycle | 100% inspection coverage — every accessible asset, every patrol |
| Mean Time to Repair (MTTR) | 4-8 hours from anomaly onset to work order creation — delayed by inspection gaps | Real-time CMMS work order generation — anomaly to notification in under 60 seconds | 20-40% MTTR improvement through immediate detection and automated escalation |
| ROI Payback Period | No technology investment — reactive maintenance model with escalating failure costs | Combined savings from downtime reduction, repair cost avoidance, and extended asset life | 6-12 month ROI payback based on documented pilot outcomes across similar operations |
Expert Review — A Warehouse Operations Leader's Perspective on Humanoid Equipment Health Patrols
I have managed maintenance and reliability programs across three large-scale warehouse and distribution operations over 17 years. The most persistent operational gap I have observed is the mismatch between equipment criticality and inspection coverage — our most valuable assets are checked the least because they are the most distributed across the facility footprint. We tried sensor networks, but they only monitored single parameters. We tried increasing manual rounds, but the cost was prohibitive and the coverage gains were marginal. The humanoid equipment health patrol approach I have evaluated through iFactory's pilot methodology addresses the gap directly — it provides consistent, repeatable, multi-sensor inspection coverage across every asset on the patrol route without requiring additional headcount. The 12-week pilot structure is practical because it validates the use case before full commitment. What I tell other warehouse operations leaders is that if you are still relying on manual patrols for equipment health monitoring, you are accepting a level of undetected risk that autonomous inspection technology can eliminate with measurable ROI and predictable deployment timelines.
Conclusion — The 12-Week Humanoid Pilot Roadmap Delivers a Measurable Path to Autonomous Equipment Health Patrols
Warehouse and intralogistics operations face a persistent equipment health monitoring gap — manual patrols cannot achieve the coverage, frequency, or consistency required to detect anomalies before they escalate into downtime events. Humanoid robots equipped with embodied AI close this gap by providing autonomous patrols that inspect every accessible asset at defined intervals, detect thermal, acoustic, and visual anomalies with AI accuracy exceeding 92%, and integrate equipment health records directly with CMMS and WMS systems for real-time work order generation. The 12-week pilot roadmap provides a structured, low-risk path to validate these capabilities in your specific warehouse environment — from site assessment through KPI validation and scale planning. The platform operates on the same facility infrastructure already in place. No modifications to racking, equipment, or control systems are required. Book a Demo to start the equipment health patrol assessment for your warehouse and discover how much value humanoid autonomous inspection can deliver for your operation.
Frequently Asked Questions — Humanoid Equipment Health Patrol Pilot for Warehouses
Humanoid robots use SLAM-based localization with LiDAR, depth cameras, and proximity sensors to navigate warehouse environments safely alongside moving equipment and personnel. Patrol routes are programmed during the site assessment phase to avoid high-traffic zones where possible and to navigate intersections and aisle crossings with controlled behavior. The robot detects dynamic obstacles — including forklifts, pallet jacks, and personnel — and adjusts its path or pauses until the path is clear. Speed is configurable and typically set to match walking pace for safe interaction with warehouse traffic. The safety system includes emergency stop functionality, audible alerts when personnel approach, and compliance with applicable ANSI and ISO safety standards for mobile industrial robots. Safety compliance is reviewed during the solution design phase and validated during deployment testing.
The humanoid robot is designed to inspect any equipment accessible within normal walking patrol paths in warehouse environments. Typical inspected assets include conveyor drives and motors, sortation system components, ASRS cranes and rails, forklift battery charging stations, air compressors and dryers, electrical panel boards, HVAC units, lighting control systems, and fire suppression equipment. The multi-sensor payload detects thermal anomalies — overheating motors, bearings, electrical connections, and battery charging equipment — as well as acoustic anomalies including bearing wear, belt degradation, air leaks, and compressor valve issues. The asset list is configured during the site assessment phase based on criticality ranking and accessibility. Assets requiring elevated access or confined-space entry are addressed through supplementary fixed sensors or scheduled manual inspection integrated into the same platform.
The platform includes pre-built connectors for major CMMS and WMS platforms used in warehouse operations. The integration is bi-directional — the platform reads asset lists and maintenance schedules from the CMMS to configure patrol routes and inspection parameters, and writes anomaly detection events, sensor data attachments, and work order requests back into the CMMS in real time. Standard connectors are available for SAP EWM and PM modules, Oracle WMS, Manhattan Associates, Blue Yonder, HighJump, and most SQL-based maintenance and warehouse management platforms. The platform also exports inspection data in standard formats for integration with custom or legacy systems through REST APIs and OPC-UA protocols. Integration setup is completed during the weeks 5-6 deployment phase without requiring modifications to existing enterprise software systems.
When the AI detection engine identifies an anomaly exceeding the configured threshold, the platform executes a multi-step response sequence. The anomaly is classified — thermal, acoustic, or visual — and assigned a severity level based on deviation magnitude. A structured data record is created with asset identification, sensor data files, classification, severity, and timestamp. The platform creates a work order in the connected CMMS with all supporting data attached and assigns it to the appropriate maintenance shift based on severity and configured escalation rules. The anomaly event is displayed on the maintenance dashboard with real-time status tracking. The robot continues its patrol route without interruption. When the anomaly is resolved, the maintenance team closes the work order, and the platform logs the resolution for model refinement — improving future detection accuracy for similar anomaly signatures on the same asset type.
The humanoid robot operates on a patrol-and-charge cycle that is configured during deployment based on the facility layout and patrol route length. Typical operation consists of 3 to 4 hours of continuous patrol time followed by a 1-hour charging cycle. The robot automatically returns to its docking station when battery charge reaches the configured threshold, recharges, and resumes the patrol route from the point of interruption. For continuous 24/7 coverage, the patrol schedule is designed so that charging cycles do not create coverage gaps — multiple patrol routes can be staggered, or a single robot's patrol interval accounts for charging time while maintaining acceptable coverage frequency. The docking station requires a standard 120V or 240V electrical connection and occupies approximately 1 square meter of floor space. Battery health is monitored by the platform, and replacement intervals are communicated through the system's maintenance scheduling module.