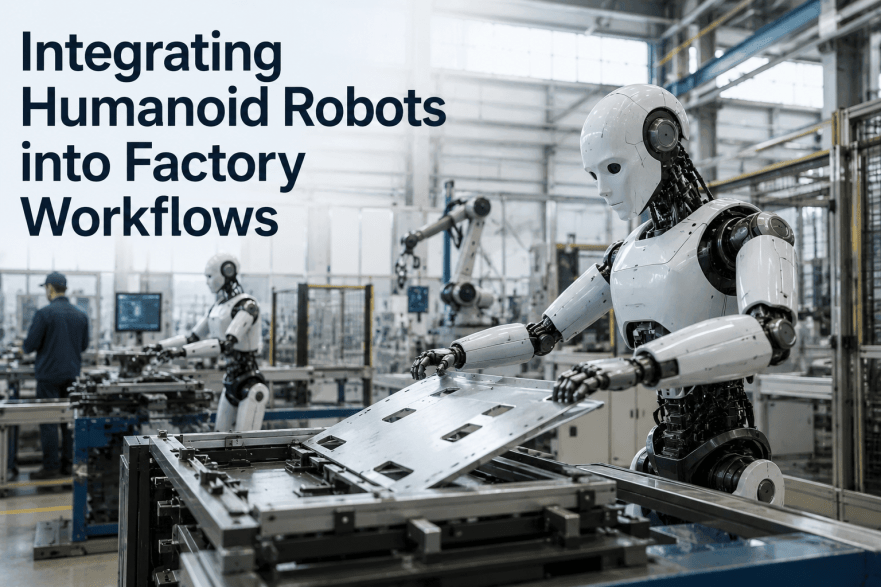
The modern factory floor is running multiple robot types simultaneously — autonomous mobile robots moving material between workstations, collaborative robots performing assembly and inspection at fixed stations, and increasingly, humanoid robots executing flexible manipulation tasks in spaces designed for human workers. Each of these platforms came with its own fleet management software, its own task assignment interface, and its own approach to navigation and collision avoidance. The result in most U.S. manufacturing facilities is not a coordinated robotics fleet — it is three or four separate robotic ecosystems operating in the same physical space with no shared intelligence about task priorities, traffic patterns, or dynamic obstacle states. AMRs queue at charging stations while cobots idle waiting for material that a differently managed AMR could have delivered six minutes earlier. Humanoid robots enter navigation zones occupied by AMRs because neither system's fleet manager can see the other's real-time position data. Material flow optimization is impossible because the system with production schedule visibility has no authority over the physical robots executing the flow. iFactory's ROS 2-based robotics fleet orchestration platform resolves this fragmentation at the architecture level: a single AI hub built on Robot Operating System 2 that coordinates AMR fleets, cobot workcells, and humanoid robot deployments from one task allocation engine, one real-time traffic management layer, and one production-schedule-aware optimization model. U.S. manufacturers that have deployed iFactory's fleet orchestration platform report 34% improvement in material flow throughput, 61% reduction in robot-to-robot gridlock events, and 28% increase in overall robot fleet utilization from the same hardware — without adding a single new robot to the floor.
34%
Material flow throughput improvement from unified multi-robot task allocation and traffic coordination
61%
Reduction in robot-to-robot gridlock events — real-time traffic management across all platform types
28%
Increase in total robot fleet utilization — from same hardware, no additional capital expenditure required
ROS 2
Open architecture foundation — vendor-agnostic coordination across any AMR, cobot, or humanoid platform with ROS 2 support
Why Siloed Robot Fleet Management Destroys the ROI of Your Robotics Investment
The capital investment in a multi-robot manufacturing facility — AMR fleet, cobot workcell installations, and humanoid robot deployments — is typically $2 to $8 million for a mid-size U.S. operation. The ROI case for that investment is built on throughput improvements and labor cost offsets that assume the robots are executing tasks at high utilization with minimal idle time and zero coordination failure. The siloed fleet management reality in most facilities destroys that assumption. When AMR task assignment is managed by the AMR vendor's proprietary software with no visibility into the cobot workcell's material demand queue, the material flow optimization that was the primary ROI driver of the AMR investment does not happen. The AMRs execute tasks in the order their proprietary scheduler assigns them — which is not the order that minimizes cobot idle time or maximizes throughput on the production schedule's critical path.
The gridlock problem is even more direct in its cost impact. A factory floor where AMRs and humanoid robots share navigation space without a shared traffic management layer will generate robot-to-robot blocking events — situations where one robot's navigation path requires another robot to stop, generating idle time that cascades into production delays. In high-density robot environments, these blocking events accumulate to 8 to 18% of total robot operating time lost to avoidable waiting. At a capital cost of $2 million for a 20-robot AMR fleet, 13% idle time from traffic conflicts is $260,000 in annual capital investment delivering no throughput value. iFactory eliminates this through real-time traffic coordination that knows where every robot is and reroutes dynamically before conflicts occur. Book a Demo to see iFactory's fleet orchestration dashboard live on a factory floor simulation.
Fragmented Fleet Management — One Interface Per Robot Type
Most U.S. manufacturers operating mixed robot fleets manage AMRs from one vendor console, cobots from another, and humanoids from a third — with no shared situational awareness, no cross-fleet task prioritization, and no unified performance visibility. Coordination decisions happen through manual operator intervention, not algorithmic optimization.
Traffic Conflicts From No Shared Navigation Awareness
AMRs and humanoid robots sharing factory floor space without a unified traffic management layer generate 8 to 18% of total robot operating time lost to avoidable blocking events. Each blocking event is a cascade — one stopped robot delays the downstream task that depends on its delivery, which delays the workcell waiting for that material, which compounds into minutes of lost production per event.
No Production-Schedule Awareness in Robot Task Assignment
AMR fleet schedulers optimize within their own task queue — minimizing robot travel distance or maximizing pick-and-place cycle throughput — without any visibility into which material deliveries are on the production schedule's critical path. A robot executing a low-priority stock replenishment task while a critical assembly line waits for material is a scheduling failure invisible to any single-vendor fleet manager.
No Unified Performance Visibility Across the Mixed Fleet
Fleet utilization, task completion rates, idle time attribution, and throughput contribution cannot be calculated across a mixed robot fleet when each platform reports into a separate management system. Without unified performance data, robotics investment ROI cannot be measured accurately and improvement opportunities in task allocation and traffic management remain invisible.
The iFactory ROS 2 Fleet Orchestration Architecture: Six Platform Capabilities That Unify the Mixed Robot Fleet
iFactory's fleet orchestration platform is built on ROS 2 — the industry-standard open architecture for industrial robotics that provides the communication middleware, lifecycle management, and sensor fusion framework required to coordinate heterogeneous robot fleets from a single hub. The ROS 2 foundation means iFactory is vendor-agnostic: any AMR, cobot, or humanoid platform that supports ROS 2 or provides a ROS 2 bridge interface can be coordinated from the same platform — without hardware replacement and without proprietary lock-in. Book a Demo to see iFactory's platform connected to your specific robot fleet configuration.
Cap 01
Unified Multi-Robot Task Allocation
iFactory's task allocation engine receives production task requests from the MES or ERP, decomposes them into robot-executable subtasks, and assigns each subtask to the best-available robot based on real-time capability match, current load, proximity, and production schedule priority. AMRs, cobots, and humanoids are evaluated simultaneously for each task — with the allocation engine selecting the robot type and specific unit that minimizes total task completion time on the production schedule's critical path, not just the nearest available unit.
Cross-fleet task prioritization
Schedule-aware allocation
Capability-matched assignment
Cap 02
Real-Time Traffic Management and Gridlock Prevention
The traffic management layer maintains a shared dynamic map of all robot positions, planned navigation paths, and reserved floor space zones — updated at 10 Hz from each robot's ROS 2 position broadcast. The AI traffic controller identifies potential path conflicts 3 to 8 seconds before they would materialize into blocking events, rerouting the lower-priority robot dynamically without stopping either unit. This predictive conflict resolution — rerouting before the conflict rather than stopping after it — is what produces the 61% reduction in gridlock events while maintaining higher overall throughput than stop-and-wait conflict resolution.
10 Hz position map update
Predictive conflict detection
Dynamic rerouting without stops
Cap 03
AMR Fleet Coordination and Charging Optimization
AMR fleet coordination in iFactory covers full lifecycle management for each unit — task assignment, route planning, charging cycle scheduling, and maintenance dispatch. The charging optimization model predicts each AMR's battery depletion point based on current task load and queued assignments, scheduling charging dispatches that prevent on-task battery failures while minimizing the productive time consumed by charging. For fleets with 8 to 30 AMRs, coordinated charging typically recovers 12 to 18% of total AMR operating hours compared to threshold-based charging schedules.
Predictive battery management
Coordinated charging dispatch
Fleet-level route optimization
Cap 04
Cobot Workcell Integration and Material Demand Broadcasting
Cobot workcells integrated with iFactory broadcast their material demand states — current buffer inventory, projected depletion time, and production cycle rate — to the task allocation engine in real time. This demand broadcasting enables the AMR fleet to prioritize material deliveries to workcells approaching buffer depletion before the depletion triggers a production stop, converting reactive replenishment (AMR dispatched after the buffer is empty) to predictive replenishment (AMR dispatched with the material arriving 3 to 8 minutes before buffer depletion).
Real-time buffer monitoring
Predictive replenishment dispatch
Workcell cycle synchronization
Cap 05
Humanoid Robot Deployment and Task Management
Humanoid robots require specialized task management that accounts for their unique capability profile — high dexterity for manipulation tasks, natural-space navigation, and safe operation in proximity to human workers — while coordinating them with the fixed-station cobots and mobile AMRs they work alongside. iFactory's humanoid integration layer manages task assignment from the same unified task queue as AMRs and cobots, with safety zone enforcement that maintains exclusion volumes around humanoid operating spaces and human presence detection that pauses humanoid tasks when workers enter proximity zones.
Safety zone enforcement
Human proximity detection
Capability-aware task matching
Cap 06
Fleet Performance Analytics and ROI Measurement
iFactory's analytics layer calculates unified fleet performance metrics across all robot types — total fleet utilization, task completion rates, idle time attribution by cause (charging, traffic conflict, task queue gap, or maintenance), throughput contribution per robot unit, and material flow performance against the production schedule. These metrics produce the cross-fleet performance visibility required to measure robotics investment ROI accurately, identify underperforming robots for maintenance or redeployment decisions, and quantify the value of orchestration improvements over time.
Cross-fleet utilization tracking
Idle time attribution
ROI measurement dashboard
Want to see iFactory's six-capability orchestration platform demonstrated on a factory floor configuration equivalent to your AMR, cobot, and humanoid deployment? Book a 30-minute fleet orchestration demonstration with iFactory's robotics engineering team.
Fleet Orchestration Performance Benchmarks: What U.S. Manufacturers Achieve Across Robot Fleet Types
The performance outcomes of unified fleet orchestration versus siloed fleet management have been measured across multiple U.S. manufacturing deployments. The table below presents the documented performance improvements by fleet type and metric category — giving robotics engineers, operations directors, and capital planning teams the specific numbers required to build the orchestration investment case against their current fleet management baseline.
See iFactory's Fleet Orchestration Demonstrated on Your AMR, Cobot, and Humanoid Configuration
iFactory's robotics engineering team demonstrates the unified task allocation, real-time traffic management, and fleet performance analytics on a simulation built to match your facility's robot fleet composition, floor layout, and production schedule requirements — before any deployment commitment.
Building the Business Case: From Fleet Fragmentation to Orchestration ROI
The investment case for fleet orchestration software is built on four simultaneous value streams — throughput improvement from better task allocation, capital efficiency from higher utilization of existing robots, labor reduction from eliminating manual coordination, and maintenance cost reduction from predictive robot health management. iFactory's ROI framework documents each stream with facility-specific data, producing the business case documentation required for capital authorization.
A
Throughput and Production Schedule Value
The 34% material flow throughput improvement translates directly into reduced production delays attributable to material starvation events — each of which generates downstream assembly line idle time with a production value cost at $2,400 to $8,600 per hour depending on the production unit. iFactory's throughput value calculation uses the facility's actual material starvation event history and production rate data to generate a conservative, base, and upside throughput improvement value before deployment.
B
Capital Efficiency — Deferred Robot Purchases
A 28% improvement in robot fleet utilization from the same hardware is financially equivalent to adding 28% more robots to the fleet at zero capital cost. For a facility with a $3 million AMR investment, the utilization improvement delivers $840,000 in deferred capital — the additional AMR purchase that would have been required to achieve the post-orchestration throughput level with the pre-orchestration utilization rate. This capital deferral is the largest single ROI component in most orchestration deployments.
C
Labor Cost Reduction — Operator Coordination Elimination
Facilities operating mixed robot fleets without unified orchestration typically assign 0.5 to 1.5 FTE operator positions per shift specifically to monitor and manually coordinate cross-fleet interactions — dispatching AMRs to address cobot material shortages, managing traffic conflicts between robot types, and adjusting task priorities when production schedule changes require resequencing. iFactory's algorithmic task allocation and traffic management eliminates this coordination overhead entirely, recovering the equivalent of 1 to 3 FTE positions per day.
D
Robot Health and Maintenance Cost Management
iFactory's fleet analytics layer tracks each robot's operational health metrics — motor current consumption, navigation error frequency, task execution time variance, and collision event history — identifying units with developing mechanical or software issues before they generate unplanned downtime. Predictive maintenance dispatch for AMRs and cobots, triggered from health metric anomalies rather than failure events, reduces robot unplanned downtime by 42% at comparable deployments — recovering production time and reducing emergency repair cost on high-utilization robot units.
Want to see the four-stream ROI model built for your specific robot fleet investment and production schedule? Book a demonstration and get a facility-specific ROI projection.
Expert Perspective: What Robotics Engineers and Operations Directors Say About Fleet Orchestration
"We spent 18 months building a mixed robot fleet — 16 AMRs for intralogistics, 12 cobot workcells for assembly and inspection, and a 4-unit humanoid deployment for flexible manipulation tasks. The hardware worked. Every robot vendor delivered what they sold us. The problem was that we had three management systems that didn't talk to each other, and the floor was constantly in a state of low-grade coordination failure. AMRs were executing tasks in the order the AMR scheduler assigned them, not in the order the production schedule needed them. The humanoids and AMRs were sharing the same aisle space with no shared traffic awareness — we had 3 to 4 blocking events per shift that were burning 6 to 8 minutes each. And we had no single view of what the fleet was actually doing — fleet utilization was calculated separately in three systems, none of which agreed. When we deployed unified orchestration on ROS 2, the first thing that changed was visibility — for the first time, we could see the entire fleet in one interface with real-time position and task status for every robot. The second thing that changed was task sequencing — the allocation engine started routing AMR deliveries based on which cobot workcell was closest to buffer depletion rather than which task was oldest in the queue. Material starvation events dropped by more than 80% in the first month. The gridlock events essentially disappeared within two weeks as the traffic management layer learned the high-conflict zones and started proactive rerouting. By month three, our overall fleet utilization had increased by 31% — from the same hardware. We have not added a single new robot since the orchestration deployment and we are running 28% higher throughput than we were with the full siloed fleet. That is the ROI of orchestration over hardware."
— Director of Automation and Robotics, U.S. Advanced Manufacturing Facility — 340,000 sq ft Mixed AMR, Cobot, and Humanoid Deployment — iFactory Fleet Orchestration Reference 2026
31%
fleet utilization increase from same hardware after orchestration
>80%
material starvation event reduction in first 30 days
Zero
additional robots required to achieve 28% throughput improvement
Conclusion
A mixed robot fleet without unified orchestration is a collection of individually optimized components that collectively underperform because no single system is optimizing the interaction between them. The AMRs are well-managed by their vendor's scheduler. The cobots are well-managed by their programming. The humanoids operate safely within their designed parameters. But the material flow between them is suboptimal, the traffic management between them is absent, and the production-schedule visibility that should be allocating tasks across the entire fleet is locked inside an MES that has no authority over any robot's task queue.
iFactory's ROS 2 fleet orchestration platform provides the unified coordination layer that converts a collection of siloed robot systems into a single integrated fleet — one task allocation engine, one traffic management layer, one performance analytics view — delivering the 34% throughput improvement, 61% gridlock reduction, and 28% utilization gain that the hardware investment was purchased to produce. Book a Demo to see the orchestration platform running on a simulation built to match your facility's robot fleet and floor layout.
Frequently Asked Questions
Does iFactory's orchestration platform require replacing existing AMR and cobot fleet management software?
No. iFactory connects to existing fleet management systems via ROS 2 bridge interfaces or REST APIs — adding an orchestration layer above the vendor software without replacing it. Existing vendor interfaces remain available for robot-specific configuration.
Book a Demo to review compatibility with your specific robot models.
Which AMR, cobot, and humanoid robot brands does iFactory's ROS 2 platform support?
iFactory supports any robot platform with native ROS 2 support or a ROS 2 bridge — including MiR, Fetch, Boston Dynamics Spot, Universal Robots UR-series, FANUC CRX cobots, and Agility Robotics Digit humanoids. Custom bridge development is available for platforms with proprietary protocols only.
How does the traffic management layer handle emergency stops and human safety events on the factory floor?
iFactory's traffic manager broadcasts a facility-wide soft stop signal on all ROS 2 safety topics when a safety event is detected — halting all coordinated robots within 200ms. Human presence detection zones are enforced as exclusion volumes; any robot entering these zones triggers a protective stop without requiring central system intervention.
What infrastructure does the ROS 2 orchestration platform require — servers, networking, and sensor coverage?
iFactory runs on a dedicated edge server (typically a single rack-unit GPU node) connected to the facility's Wi-Fi 6 or private 5G network. Existing robot-mounted LiDAR and cameras provide the position data; no additional infrastructure sensors are required in most facilities. Full deployment takes 3 to 6 weeks.
What is the deployment investment and payback timeline for iFactory's fleet orchestration platform?
For a facility with 10 to 40 mixed robots, deployment runs $65,000 to $155,000 over 3 to 6 weeks covering ROS 2 bridge integration, traffic map configuration, task allocation setup, and MES connectivity. Against $840,000 to $2.4M in documented annual value at comparable facilities, payback typically occurs within 2 to 4 months.
Book a Demo for a site-specific projection.
Coordinate Your Entire AMR, Cobot, and Humanoid Fleet From One AI Hub — Without Replacing Any Existing Hardware.
iFactory's ROS 2 fleet orchestration platform unifies task allocation, traffic management, and performance analytics across your mixed robot fleet — delivering 34% throughput improvement, 61% gridlock reduction, and 28% higher utilization from your existing robots.