Every power plant operator faces the same fundamental challenge with robotic deployment: testing inspection robots in live turbine halls, boiler cavities, and switchyards is slow, expensive, and operationally dangerous. A single collision with high-pressure steam piping or a misstep into a confined zone can cost millions in damage and unplanned downtime. NVIDIA Isaac Sim — built on the Omniverse platform — eliminates this risk by enabling physics-accurate, RTX-rendered simulation of power plant environments where robots can train, fail, and recover millions of times before ever touching real plant floor. Book a Demo to see how iFactory's Robotics Integration platform connects Isaac Sim-trained policies to live plant-floor robot fleets.
Is Your Robot Inspection Program Still Training on Live Plant Floor Time You Cannot Afford to Lose?
iFactory's Robotics Integration platform connects NVIDIA Isaac Sim's GPU-accelerated simulation environment to your power plant digital twin — enabling robot policy training, sensor validation, and failure-mode testing in simulation before any hardware touches the plant floor.
Why Simulation Is Essential for Power Plant Robotics
Power plants present some of the harshest operating environments for robotic deployment — extreme temperatures in boiler cavities, radiation exposure zones, confined pipe galleries with limited communication coverage, and elevated structures requiring fall-risk mitigation. Physical field testing for each scenario is logistically prohibitive and exposes both equipment and personnel to unnecessary risk. Simulation collapses these constraints, allowing robots to accumulate thousands of hours of validated operating experience in a fraction of the time and at a fraction of the cost of real-world testing. The metrics below show what simulation-enabled training delivers in practice for power plant inspection robots.
NVIDIA Isaac Sim Capability Matrix for Power Plant Inspection
Isaac Sim — built on NVIDIA Omniverse — delivers a comprehensive toolchain for power plant robotic simulation. The capability matrix below maps core simulation features to specific plant-floor inspection use cases, showing how each capability addresses a distinct deployment challenge.
| Simulation Capability | Technical Stack | Power Plant Use Case | Inspection Impact |
|---|---|---|---|
| Physics-Accurate Simulation | PhysX 5.0 with MDL materials | Collision and traction modeling in tight pipe-rack corridors and stairwells | Quadruped navigation policy validated in simulation before turbine-deck deployment |
| RTX Sensor Rendering | CUDA-accelerated ray tracing | Thermal camera and LiDAR data generation for boiler interior and switchyard patrol | Sensor-in-the-loop testing without physical camera or LiDAR hardware |
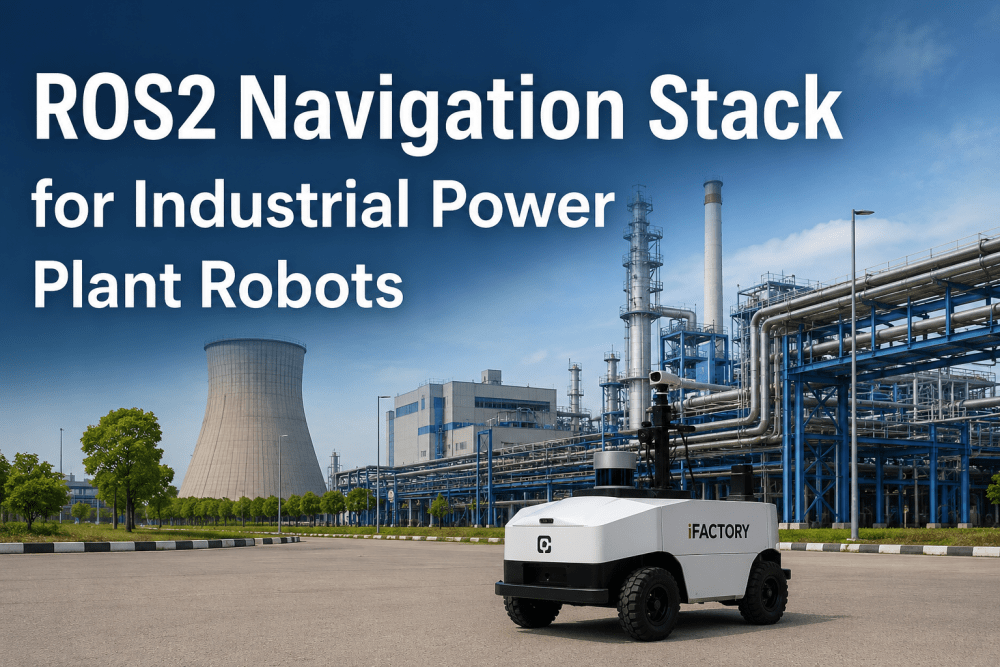
| ROS 2 / Nav2 Integration | Isaac ROS + ROS 2 Humble middleware | AMR navigation stack validation across plant floorplans with dynamic obstacles | Production navigation stack tested against thousands of plant layout permutations |
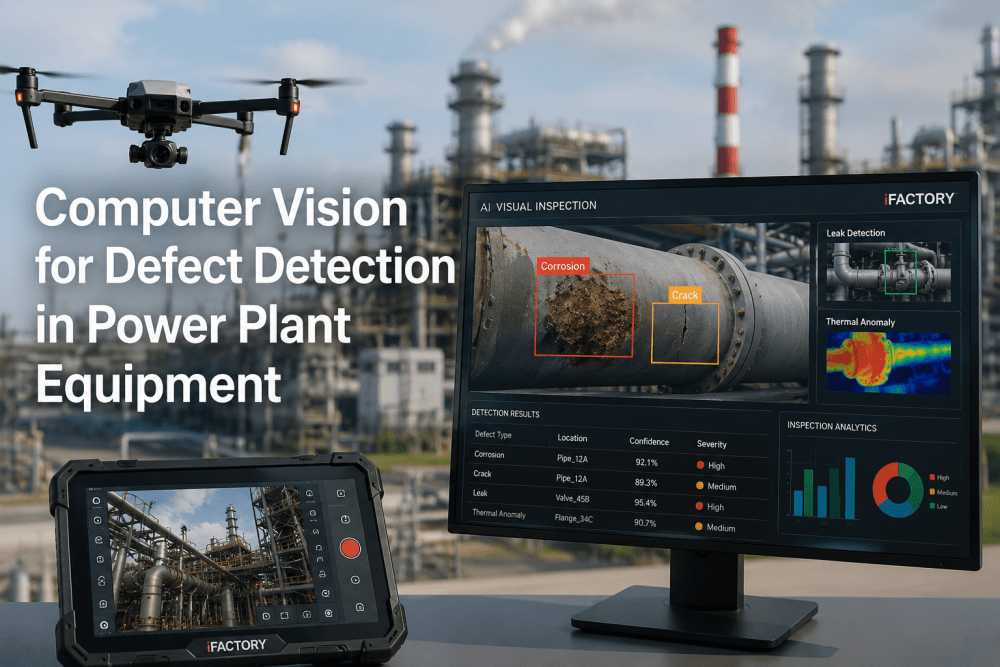
| Synthetic Data Generation | OmniReplicator + DOM pipeline | Training defect-detection vision models on steam-pipe corrosion, flange leaks, and surface cracking | AI vision models trained on simulated defects before encountering real asset degradation |
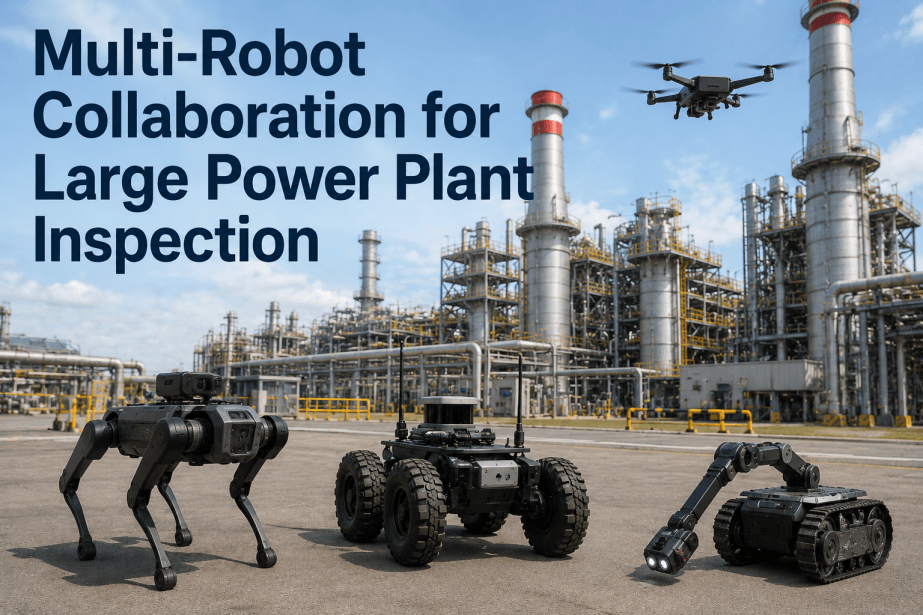
| Multi-Robot Orchestration | Isaac Sim orchestrator with fleet coordination | Simultaneous quadruped, drone, and crawler missions in shared plant volumes | Deconfliction and mission planning validated in simulation before multi-robot fleet deployment |
Physical Testing vs. Isaac Sim Simulation — The Operational Gap
The difference between physical-only robot testing and simulation-enabled training is not incremental — it is structural. Plants relying on physical testing alone typically validate fewer than 50 distinct scenarios per robot before deployment, leaving critical edge cases untested. Isaac Sim simulation closes that gap by enabling thousands of parallel scenario evaluations in a fraction of the time. Book a Demo to see how iFactory integrates Isaac Sim-trained policies into live fleet operations.
- Tested against 10–50 real-world scenarios per robot before deployment
- Requires full-scale physical mock-ups for each plant zone type
- High safety risk during live high-voltage and confined-space trials
- Limited to 1–2 scenario iterations per shift; testing cycles measured in months
- No ability to rewind and replay failure sequences for root-cause analysis
- Sensor-in-the-loop testing requires physical sensor hardware on every test rig
- 10,000+ parallel scenario runs on a single GPU server before physical deployment
- Unlimited plant environments generated from existing CAD and laser-scan data
- Zero risk — all failure modes safely simulated without personnel exposure
- Hundreds of scenario iterations per GPU-hour; testing cycles measured in days
- Full deterministic replay for forensic analysis of every failure event
- Software-in-loop sensor simulation at 60 fps without physical sensor hardware
Train in Simulation. Deploy on the Plant Floor. Repeat at Scale.
iFactory bridges NVIDIA Isaac Sim training environments to live power plant robot fleets — enabling continuous policy improvement through simulated retraining on edge cases discovered during live operations.
What Power Plant Robotics Engineers Say About Simulation-Based Training
The engineers and program managers who have adopted NVIDIA Isaac Sim as their primary robot training environment share a consistent experience: the most significant value comes not from the training acceleration alone — it comes from discovering failure modes in simulation that would have been catastrophic in the real plant environment.
We operate a team of six inspection robots across four power generation facilities — a mix of combined-cycle gas plants and coal-to-gas conversions in the U.S. Midwest. Before deploying Isaac Sim as our primary training environment, each new inspection route required two to three weeks of on-site testing with the robot in a partially operational plant. We would run each route three to five times, log the failure points, adjust the navigation stack, and repeat.
Within the first month, we identified a navigation failure mode where the quadruped's foot-placement planner failed on wet grating surfaces — a condition we had never tested in the physical plant because scheduling coincided with a dry season. That single finding prevented what would likely have been a robot fall into an open trench area during a live steam-line inspection the following quarter.
4-Phase Simulation Deployment Roadmap
Deploying NVIDIA Isaac Sim as a robot training environment for power plant inspection follows a structured four-phase sequence. Each phase delivers measurable simulation capability before progressing to the next, ensuring that safety validation, policy performance, and operator confidence compound over time.
Phase 1: Plant Digital-Twin Import and Environment Calibration
Import existing CAD, BIM, and laser-scan data into Isaac Sim through the USD pipeline. Calibrate MDL materials to match real-world surface properties — steam-pipe emissivity, grating traction coefficients, concrete reflectance, and boiler wall thermal characteristics. Validate environment fidelity by comparing simulated sensor outputs against real sensor data from walkthrough surveys. Typical duration: two to four weeks per plant zone.
Phase 2: Policy Training and Domain Randomisation
Train navigation and manipulation policies using reinforcement learning and imitation learning in Isaac Sim. Apply domain randomisation across lighting conditions, surface properties, object placement, and sensor noise to produce vision policies that generalise across the full range of plant operating conditions. Achieve sim-to-real transfer threshold of 90%+ before proceeding to physical validation. Typical duration: four to eight weeks per robot morphology.
Phase 3: Safety-Critical Scenario Enumeration and Validation
Run systematic adversarial scenario generation across all plant zones — communication loss in underground tunnels, thermal camera saturation near boiler portals, stair misalignment in turbine buildings, and dynamic obstacle encounters with plant personnel. Document failure modes, update simulation environment, and re-train policies until failure rate meets deployment threshold. Typical duration: 10,000–50,000 simulated missions per plant zone.
Phase 4: Continuous Simulation-Live Operations Feedback Loop
Deploy trained policies to plant-floor robots through iFactory's fleet orchestration platform. Stream real sensor data and failure logs back to the Isaac Sim digital twin. Use discrepancy analysis between simulated and real-world performance to refine simulation fidelity and re-train policies monthly on edge cases discovered during live operations. Simulation model accuracy compounds with every operating cycle.
Deploy Simulation-Trained Robot Policies Across Your Power Plant Fleet
iFactory registers every simulation-trained robot policy, validates sim-to-real transfer performance, monitors live deployment metrics, and enables continuous improvement through simulated retraining — in one platform built for industrial robotics operations.
NVIDIA Isaac Sim for Power Plant Robotics — Frequently Asked Questions
Can Isaac Sim model the extreme thermal conditions inside a boiler cavity for sensor-fidelity testing?
Yes. Isaac Sim supports MDL-based thermal material properties and can simulate radiant heat loads using RTX ray tracing hardware acceleration. While Isaac Sim is not a computational fluid dynamics solver, it approximates thermal gradients for sensor-fidelity testing by assigning emissivity, reflectivity, and temperature values to every surface in the scene. For applications requiring coupled thermal-fluid simulation, Isaac Sim can be co-simulated with Ansys Fluent or Star-CCM+ through the Omniverse connector framework, providing thermal boundary conditions from CFD to the sensor rendering pipeline in real time.
What GPU infrastructure is required to run Isaac Sim for a full-plant digital twin with multi-robot simulation?
NVIDIA recommends a minimum of an RTX A6000 with 48 GB VRAM for single-zone robot simulation and an NVIDIA L40S or HGX-based system for multi-zone, multi-robot digital-twin environments. For power plants with five or more robot platforms operating simultaneously, a clustered configuration with multiple L40S GPUs connected through NVLink provides the memory bandwidth and compute capacity required for real-time sensor rendering and physics simulation across all robots.
How do trained policies transfer from Isaac Sim simulation to physical robot hardware on the plant floor?
Policies trained in Isaac Sim are exported via ONNX or TensorRT for edge deployment on plant-floor robot compute modules. For ROS 2-based robots — which represent the majority of industrial inspection platforms — the Isaac ROS suite provides a direct pipeline from trained PyTorch models to ROS 2 nodes running on an NVIDIA Jetson AGX Orin or discrete GPU within the robot's onboard computer. iFactory's Robotics Integration platform manages the policy deployment workflow by versioning each exported model, validating its sim-to-real transfer metrics against baseline performance, and rolling out approved policies to fleet robots through the orchestration layer with automatic rollback capability if field performance degrades.
Can Isaac Sim simulate multiple robot platforms — quadrupeds, drones, crawlers — in the same plant environment simultaneously?
Yes. Isaac Sim supports multi-robot simulation with simultaneous physics and sensor computation for heterogeneous robot morphologies — quadrupeds, drones, magnetic crawlers, and AMR ground rovers — in the same plant environment. Each robot runs its own physics body, sensor suite, and control policy in the same simulation scene with shared environment state. This enables deconfliction algorithm validation, communication interference testing, and coordinated mission planning across the full robot fleet before any hardware deployment.
What is the typical ROI of deploying Isaac Sim as a robot training environment for a multi-plant power generation operator?
For a power generation operator deploying robots across three to five facilities, the financial case for simulation-based training is driven by three primary value streams: physical testing cost elimination ($200,000–$500,000 per year in mock-up facilities, travel, and on-site testing crew time), avoided failure cost (each prevented robot collision with live equipment avoids $100,000–$2M in damage and production loss), and deployment velocity acceleration (simulation compresses new-robot onboarding from 12–16 weeks to 3–4 weeks per facility). Operators consistently report full platform investment recovery within 8–14 months, with the largest single value driver — preventing a single high-consequence robot failure — capable of justifying the entire simulation infrastructure investment.