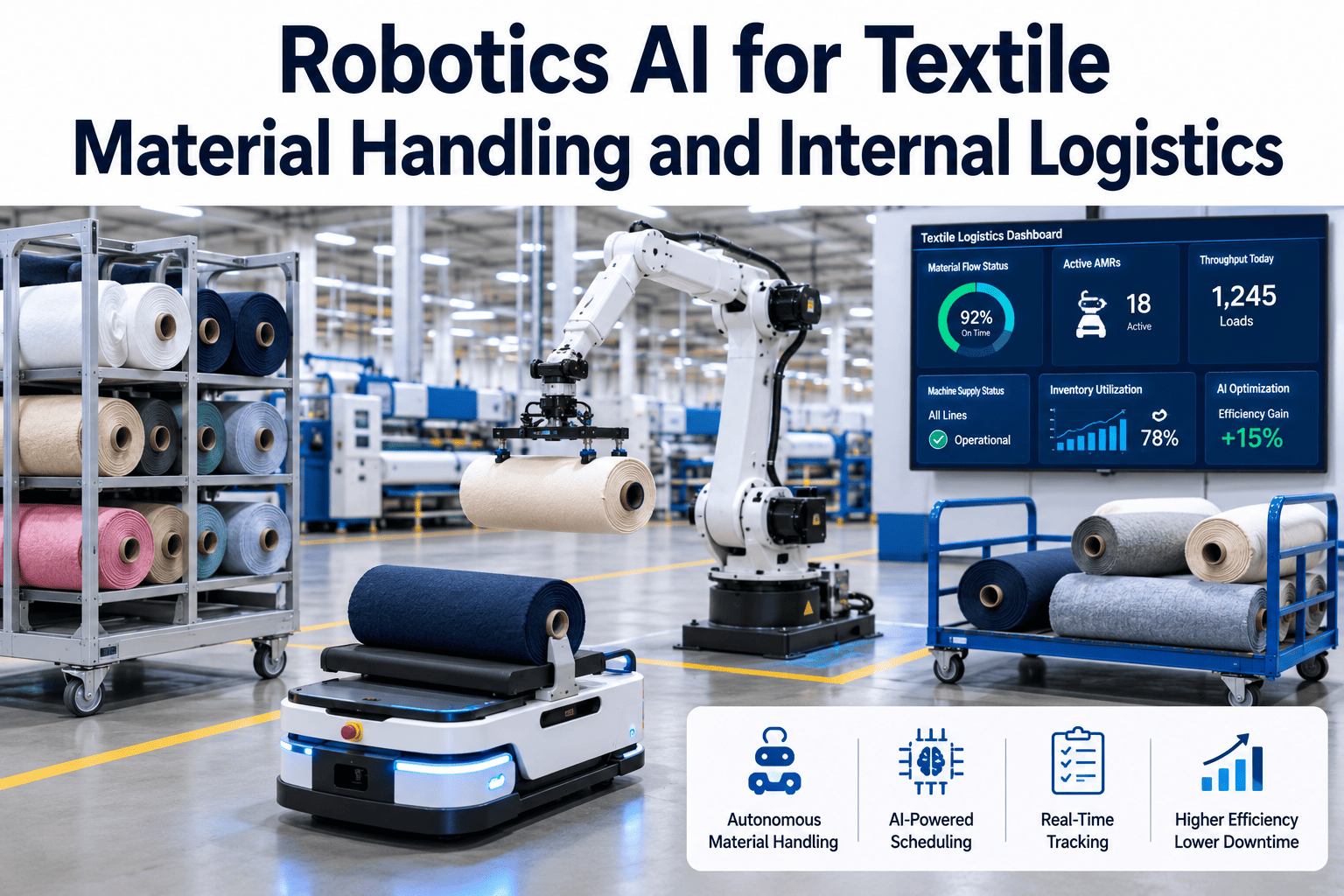
Textile mills have historically relied on manual labor for repetitive material handling tasks that consume 30–40 percent of direct labor hours in a typical spinning mill — doffing full bobbins from ring spinning frames, transporting cone packages between winding and packing stations, palletizing finished goods, and loading raw material into blowroom lines. These tasks are physically demanding, monotonous, and prone to quality variability due to human fatigue and turnover. Industrial robotics has matured to the point where automated doffing, material transport, and palletizing solutions are technically proven and financially viable for textile mills of all sizes — from 25,000 spindle compact spinning units to integrated composite mills with weaving, dyeing, and finishing. Modern textile robots operate at speeds that exceed manual handling by 3–5x while maintaining consistent quality through precise repeatability measured in tenths of a millimeter, and they integrate with existing MES and ERP systems for real-time production tracking without requiring a complete automation overhaul. This guide covers the four primary robot applications for textile mills — bobbin doffing, cone transport, palletizing, and warehouse handling — with detailed specifications, investment analysis, payback periods, department deployment strategies, and integration architecture for each use case.
Evaluate Robotics for Your Mill — Book a 30-Minute Automation Assessment
iFactory's robotics integration team has deployed automated doffing, transport, and palletizing solutions across 30+ textile mills. Get a free feasibility analysis with estimated capex, payback, and labor impact for your specific production profile.
Four Primary Robot Applications for Textile Mills
Each material handling task in a textile mill requires a different robot configuration based on payload, speed, reach, and environmental conditions. The following four robot types cover the highest-ROI automation opportunities across spinning, winding, packing, and warehouse operations. Each specification card includes typical performance ranges validated across iFactory deployment data from 30+ textile mill robotics projects.
Capex vs Annual Savings: Robotics Investment Comparison
The financial case for textile robotics depends on the specific robot type, local labor costs, shift operating patterns, and the existing level of automation in the mill. The following comparison shows typical capex ranges and corresponding annual savings for each robot type based on a three-shift operation in a 50,000-spindle spinning mill. Individual results vary by mill configuration, labor rates, and production volume.
Get a Custom Capex and Payback Analysis for Your Mill
iFactory's robotics ROI calculator factors in your specific spindle count, product mix, labor rates, and shift pattern to deliver a personalized investment comparison across all four robot types.
Mill Floor Deployment: Robot Placement Across the Textile Process Flow
Robotics deployment follows the textile production flow from incoming raw material to finished goods dispatch. Each department has specific automation opportunities that depend on the production process, material characteristics, and existing equipment layout. The deployment map below shows the primary robot type associated with each production stage and the material flow between automated zones.
Robotics Integration Stack: From Robot to Enterprise Platform
Textile robotics must be integrated into a four-layer control and information architecture to function as part of a cohesive production system rather than isolated islands of automation. Each layer communicates with adjacent layers through standardized protocols, enabling real-time coordination, production visibility, and traceability from fiber to finished product.
Robotics Payback Periods and Labor Impact by Robot Type
Payback periods for textile robotics depend on capital investment, local labor costs, shift utilization, and the specific material handling throughput requirements of each mill. The table below summarizes typical payback ranges and labor reduction metrics for each robot type based on three-shift operations in a 50,000-spindle spinning mill with US-based labor rates. Mills in regions with lower labor costs will experience proportionally longer payback periods, while higher-utilization operations achieve faster returns.
| Robot Type | Capex Range | Annual Savings | Payback Period | Labor Reduction |
|---|---|---|---|---|
| Bobbin Doffing Robot | $40K–$80K | $35K–$50K | 14–20 months | 3–4 operators/shift |
| Cone Transport AGV | $60K–$100K | $45K–$65K | 16–24 months | 2–3 operators/shift |
| Palletizing Robot | $70K–$120K | $50K–$75K | 18–26 months | 3–5 operators/shift |
| Yarn Package Handler | $40K–$70K | $30K–$50K | 12–18 months | 2–4 operators/shift |
Textile Robotics Investment and Integration: Frequently Asked Questions
What is the minimum mill size for robotics automation to be financially viable?
The minimum viable mill size depends on the robot type and the specific application. Bobbin doffing robots become financially viable at approximately 25,000 spindles for mills operating three shifts, with a payback period of 18–24 months. Cone transport AGVs are viable at 30,000+ spindles due to the fixed cost of navigation infrastructure and fleet management software. Palletizing robots can be justified at lower production volumes (15,000+ spindles) when shared across multiple packing lines. Yarn package handlers typically require larger warehouses serving 40,000+ spindles to justify the capital investment in rack infrastructure and the robotic storage and retrieval system.
Can robots be retrofitted to existing spinning frames, or do they require new machinery?
Bobbin doffing robots are designed as retrofit solutions that mount on the existing rail system of ring spinning frames without requiring modifications to the spinning machine itself. The robot runs on a dedicated gantry or rail system installed above or alongside the existing spinning frames and interfaces with the frame's existing doffing signal and tube detection sensors. Installation typically requires 2–4 days per machine section and can be completed during scheduled maintenance windows. Cone transport AGVs and palletizing robots require no modifications to existing production machinery — they operate in the existing aisle and floor space with minimal facility modifications.
How does robot integration affect existing MES and ERP data flows?
Robots connect to the MES through the network layer using OPC UA or MQTT protocols, reporting real-time production events (doffing complete, transport task finished, pallet built) that update inventory, work-in-progress tracking, and machine status in the MES automatically. The integration eliminates manual data entry and barcode scanning steps that are prone to error and delay. Robots receive work orders from the MES — for example, which specific yarn counts to transport to which packing station — and confirm completion with precise timestamps. This bidirectional data flow creates a fully digital production record from spinning through dispatch without manual intervention.
What is the typical maintenance requirement for textile mill robots?
Textile mill robots require 2–4 hours of preventive maintenance per month per robot, typically performed during planned production stops. Maintenance tasks include gripper pad inspection and replacement, bearing lubrication, sensor cleaning (cotton dust accumulates on optical sensors), cable management checks, and software updates. The textile environment presents specific challenges for robotics — cotton dust, fiber fly, high humidity, and temperature variations — so robots deployed in textile mills should have IP54 or higher ingress protection ratings. Most robot manufacturers offer remote monitoring and diagnostics that alert maintenance teams to developing issues before they cause unplanned downtime.
How do textile mills manage the transition from manual to robotic operations without disrupting production?
The transition follows a phased deployment strategy that maintains full production throughput throughout the implementation. Phase 1 installs robots on one machine section or one production line as a pilot while adjacent sections continue manual operation. Phase 2 runs the pilot section in parallel with manual operations for 2–4 weeks to validate performance, train operators, and fine-tune robot parameters. Phase 3 expands deployment to additional sections while retaining manual operators as backup. Phase 4 reallocates operators to higher-value quality inspection and process optimization roles as robot reliability is proven. This approach eliminates production risk and allows operators to transition gradually from manual handling to robot supervision and troubleshooting roles.
Start Your Robotics Automation Journey — Schedule a Feasibility Study
iFactory's robotics team will conduct an on-site or virtual assessment of your mill's material handling operations, identify the highest-ROI automation candidates, and deliver a detailed investment proposal with capex, payback, and implementation timeline.